 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeADMM-MCBF-LCA: A Layered Control Architecture for Safe Real-Time Navigation
Paper and Code
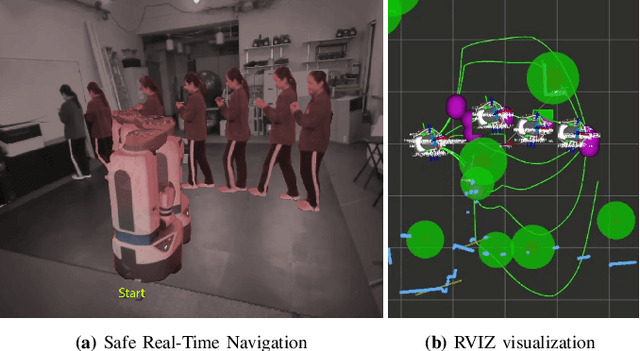
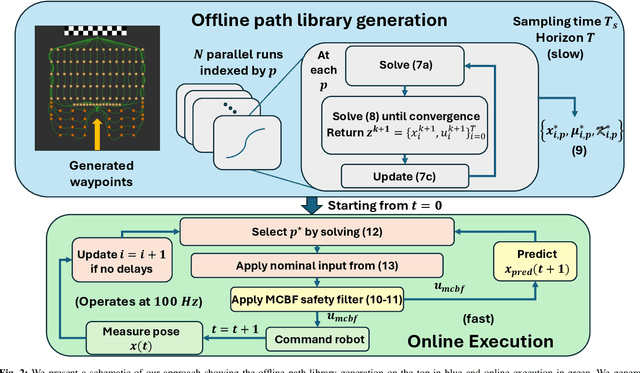
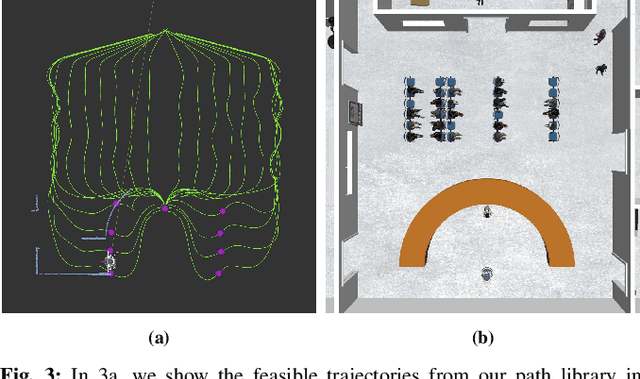
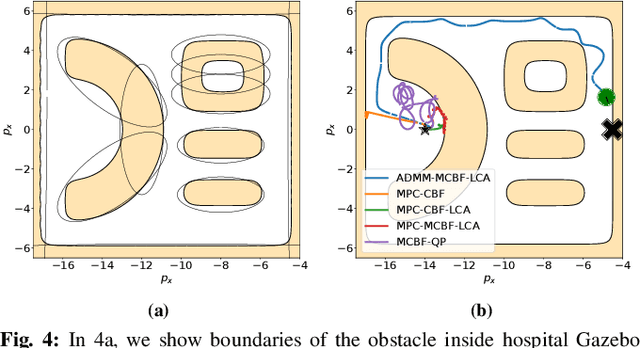
We consider the problem of safe real-time navigation of a robot in a dynamic environment with moving obstacles of arbitrary smooth geometries and input saturation constraints. We assume that the robot detects and models nearby obstacle boundaries with a short-range sensor and that this detection is error-free. This problem presents three main challenges: i) input constraints, ii) safety, and iii) real-time computation. To tackle all three challenges, we present a layered control architecture (LCA) consisting of an offline path library generation layer, and an online path selection and safety layer. To overcome the limitations of reactive methods, our offline path library consists of feasible controllers, feedback gains, and reference trajectories. To handle computational burden and safety, we solve online path selection and generate safe inputs that run at 100 Hz. Through simulations on Gazebo and Fetch hardware in an indoor environment, we evaluate our approach against baselines that are layered, end-to-end, or reactive. Our experiments demonstrate that among all algorithms, only our proposed LCA is able to complete tasks such as reaching a goal, safely. When comparing metrics such as safety, input error, and success rate, we show that our approach generates safe and feasible inputs throughout the robot execution.