 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeACuTE: Automatic Curriculum Transfer from Simple to Complex Environments
Paper and Code
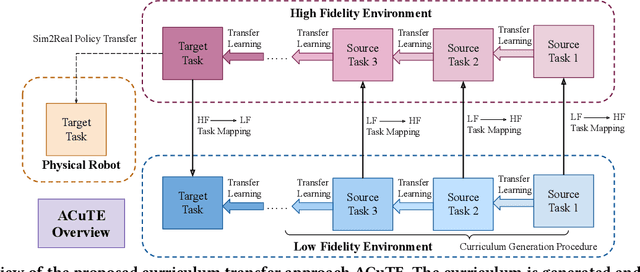
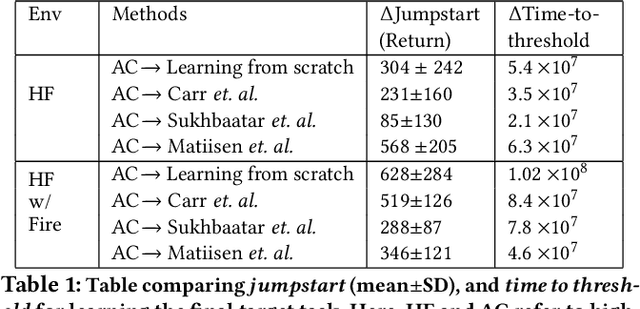
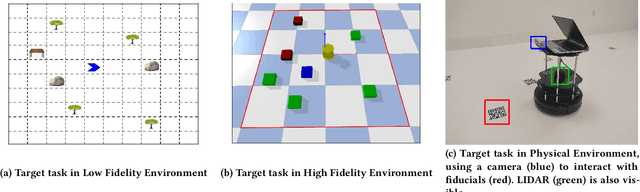

Despite recent advances in Reinforcement Learning (RL), many problems, especially real-world tasks, remain prohibitively expensive to learn. To address this issue, several lines of research have explored how tasks, or data samples themselves, can be sequenced into a curriculum to learn a problem that may otherwise be too difficult to learn from scratch. However, generating and optimizing a curriculum in a realistic scenario still requires extensive interactions with the environment. To address this challenge, we formulate the curriculum transfer problem, in which the schema of a curriculum optimized in a simpler, easy-to-solve environment (e.g., a grid world) is transferred to a complex, realistic scenario (e.g., a physics-based robotics simulation or the real world). We present "ACuTE", Automatic Curriculum Transfer from Simple to Complex Environments, a novel framework to solve this problem, and evaluate our proposed method by comparing it to other baseline approaches (e.g., domain adaptation) designed to speed up learning. We observe that our approach produces improved jumpstart and time-to-threshold performance even when adding task elements that further increase the difficulty of the realistic scenario. Finally, we demonstrate that our approach is independent of the learning algorithm used for curriculum generation, and is Sim2Real transferable to a real world scenario using a physical robot.