 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAccidentSim: Generating Physically Realistic Vehicle Collision Videos from Real-World Accident Reports
Paper and Code
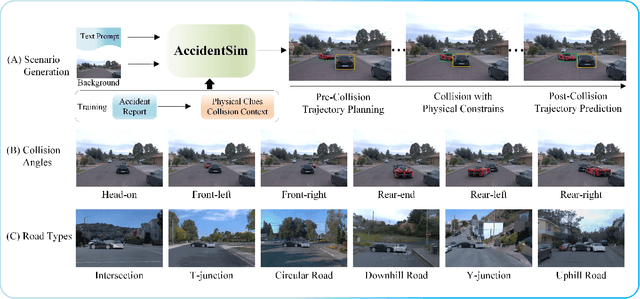

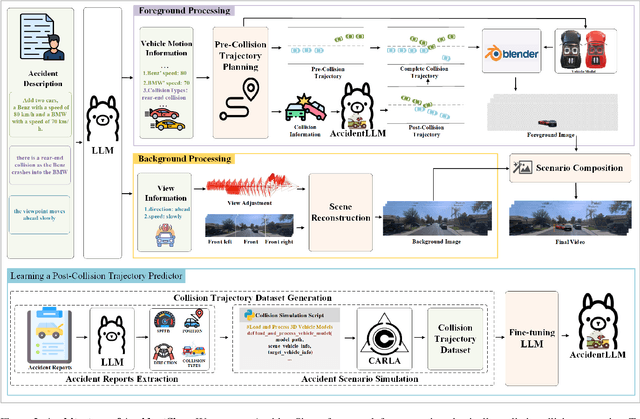

Collecting real-world vehicle accident videos for autonomous driving research is challenging due to their rarity and complexity. While existing driving video generation methods may produce visually realistic videos, they often fail to deliver physically realistic simulations because they lack the capability to generate accurate post-collision trajectories. In this paper, we introduce AccidentSim, a novel framework that generates physically realistic vehicle collision videos by extracting and utilizing the physical clues and contextual information available in real-world vehicle accident reports. Specifically, AccidentSim leverages a reliable physical simulator to replicate post-collision vehicle trajectories from the physical and contextual information in the accident reports and to build a vehicle collision trajectory dataset. This dataset is then used to fine-tune a language model, enabling it to respond to user prompts and predict physically consistent post-collision trajectories across various driving scenarios based on user descriptions. Finally, we employ Neural Radiance Fields (NeRF) to render high-quality backgrounds, merging them with the foreground vehicles that exhibit physically realistic trajectories to generate vehicle collision videos. Experimental results demonstrate that the videos produced by AccidentSim excel in both visual and physical authenticity.