Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Validated Physical Model For Real-Time Simulation of Soft Robotic Snakes
Paper and Code
Apr 05, 2019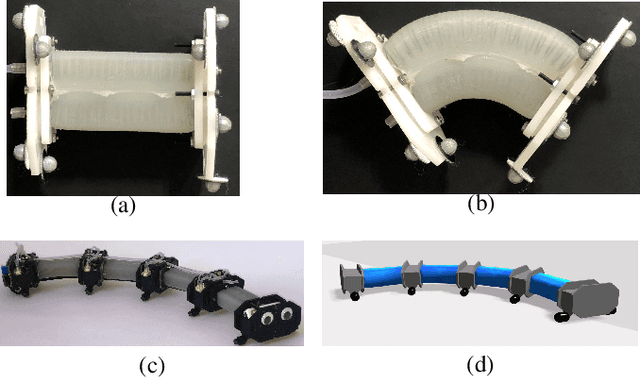

In this work we present a framework that is capable of accurately representing soft robotic actuators in a multiphysics environment in real-time. We propose a constraint-based dynamics model of a 1-dimensional pneumatic soft actuator that accounts for internal pressure forces, as well as the effect of actuator latency and damping under inflation and deflation and demonstrate its accuracy a full soft robotic snake with the composition of multiple 1D actuators. We verify our model's accuracy in static deformation and dynamic locomotion open-loop control experiments. To achieve real-time performance we leverage the parallel computation power of GPUs to allow interactive control and feedback.
* Paper accepted on ICRA 2019. Supplemental video
https://youtu.be/wUAGTeKtKsc
View paper on