 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Survey of Embodied Learning for Object-Centric Robotic Manipulation
Paper and Code
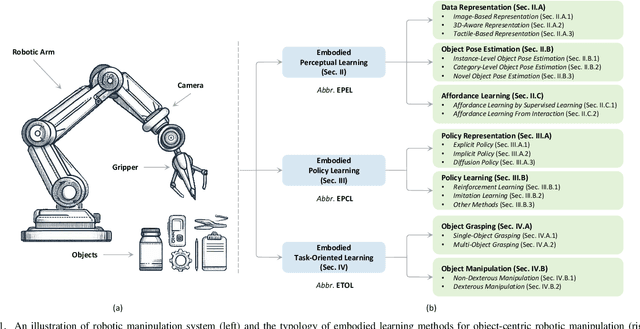
Embodied learning for object-centric robotic manipulation is a rapidly developing and challenging area in embodied AI. It is crucial for advancing next-generation intelligent robots and has garnered significant interest recently. Unlike data-driven machine learning methods, embodied learning focuses on robot learning through physical interaction with the environment and perceptual feedback, making it especially suitable for robotic manipulation. In this paper, we provide a comprehensive survey of the latest advancements in this field and categorize the existing work into three main branches: 1) Embodied perceptual learning, which aims to predict object pose and affordance through various data representations; 2) Embodied policy learning, which focuses on generating optimal robotic decisions using methods such as reinforcement learning and imitation learning; 3) Embodied task-oriented learning, designed to optimize the robot's performance based on the characteristics of different tasks in object grasping and manipulation. In addition, we offer an overview and discussion of public datasets, evaluation metrics, representative applications, current challenges, and potential future research directions. A project associated with this survey has been established at https://github.com/RayYoh/OCRM_survey.