Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Study of Joint Graph Inference and Forecasting
Paper and Code
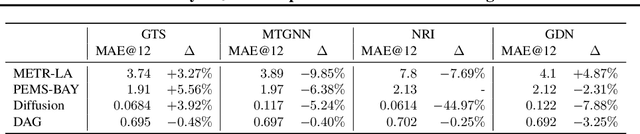
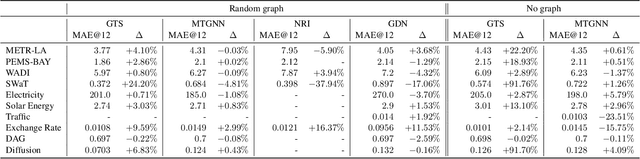
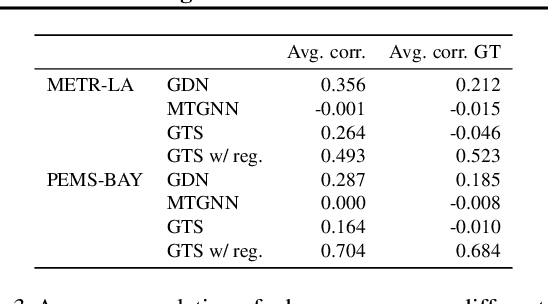
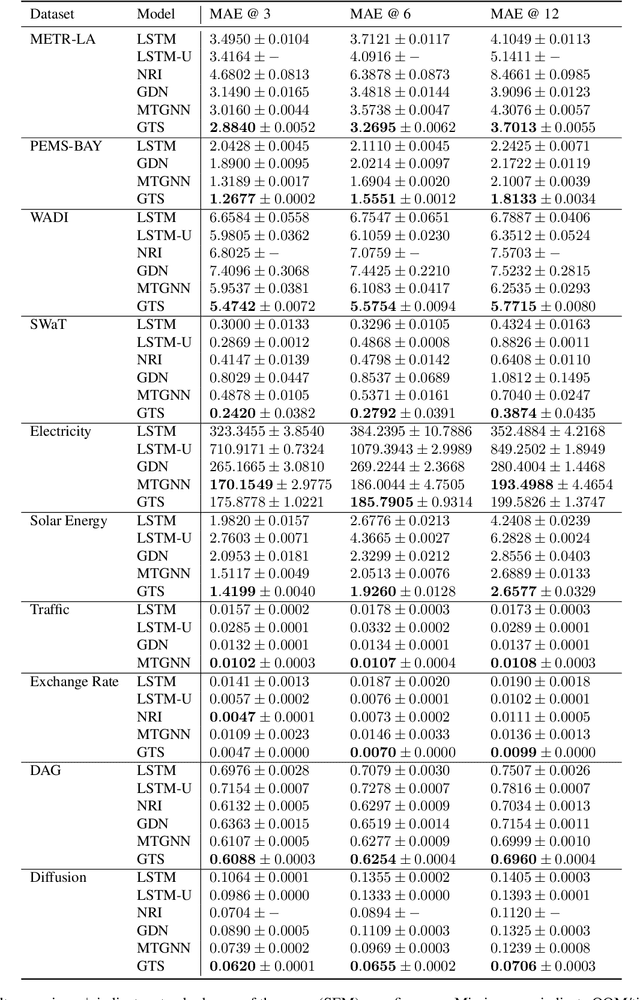
We study a recent class of models which uses graph neural networks (GNNs) to improve forecasting in multivariate time series. The core assumption behind these models is that there is a latent graph between the time series (nodes) that governs the evolution of the multivariate time series. By parameterizing a graph in a differentiable way, the models aim to improve forecasting quality. We compare four recent models of this class on the forecasting task. Further, we perform ablations to study their behavior under changing conditions, e.g., when disabling the graph-learning modules and providing the ground-truth relations instead. Based on our findings, we propose novel ways of combining the existing architectures.
* Published at the ICML 2021 Time Series Workshop
View paper on