 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Simple and Efficient Registration of 3D Point Cloud and Image Data for Indoor Mobile Mapping System
Paper and Code
Oct 27, 2020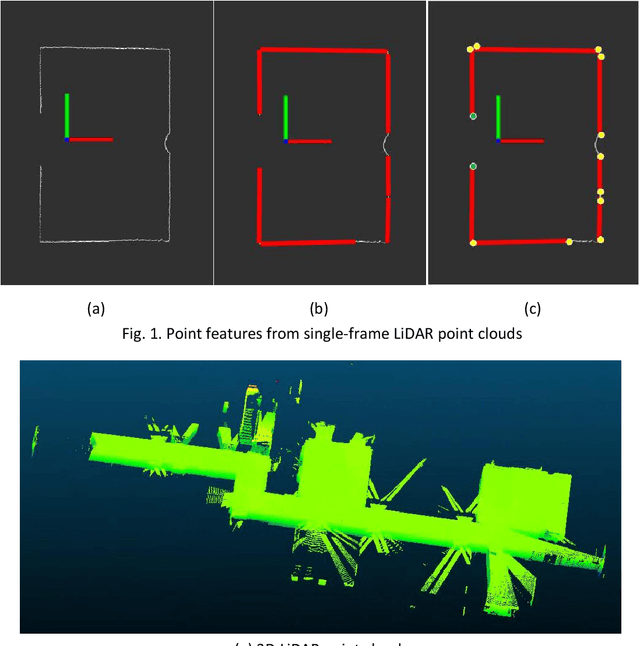
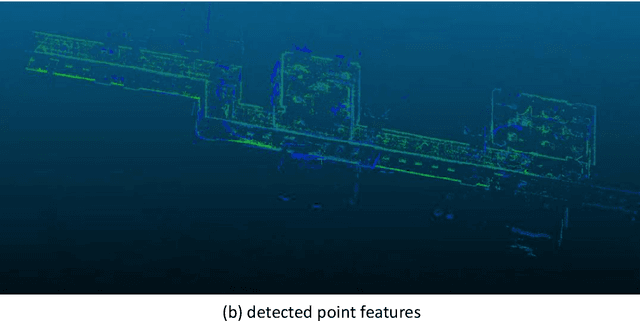
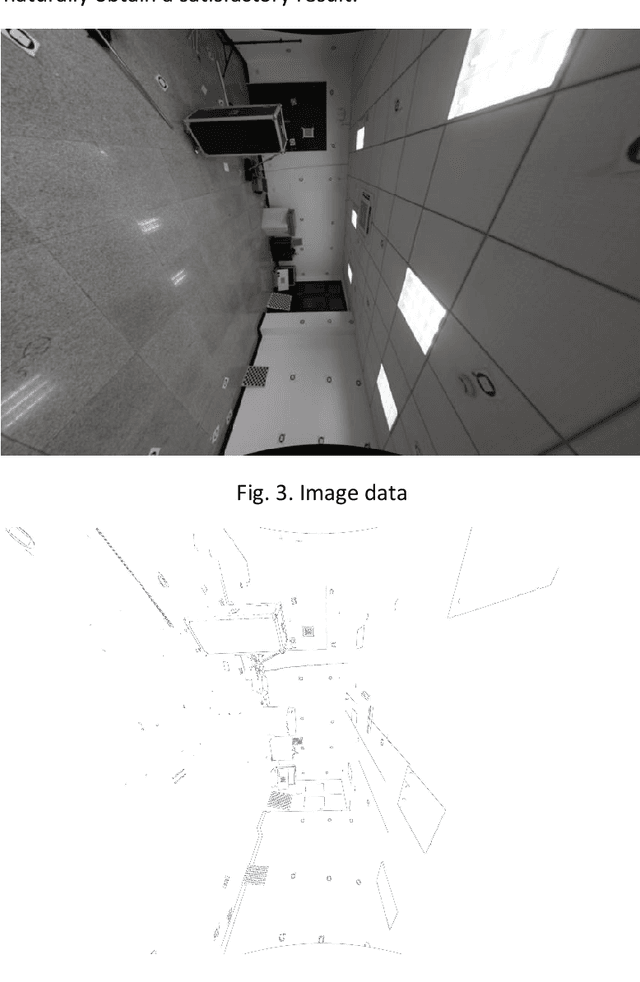
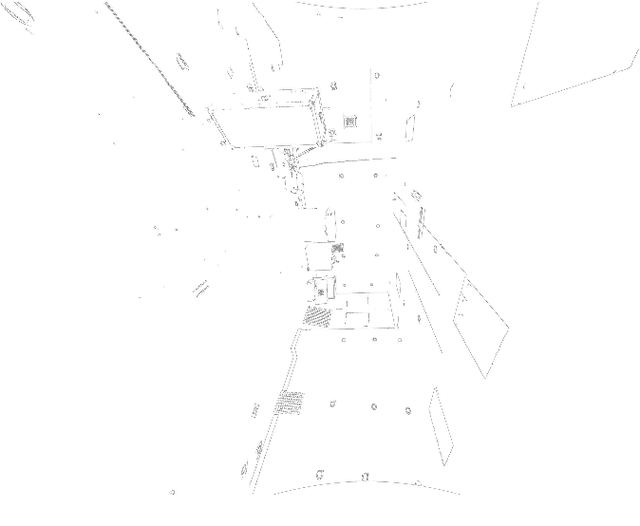
Registration of 3D LiDAR point clouds with optical images is critical in the combination of multi-source data. Geometric misalignment originally exists in the pose data between LiDAR point clouds and optical images. To improve the accuracy of the initial pose and the applicability of the integration of 3D points and image data, we develop a simple but efficient registration method. We firstly extract point features from LiDAR point clouds and images: point features is extracted from single-frame LiDAR and point features from images using classical Canny method. Cost map is subsequently built based on Canny image edge detection. The optimization direction is guided by the cost map where low cost represents the the desired direction, and loss function is also considered to improve the robustness of the the purposed method. Experiments show pleasant results.