 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Multi-Robot Cooperation Framework for Sewing Personalized Stent Grafts
Paper and Code
Nov 08, 2017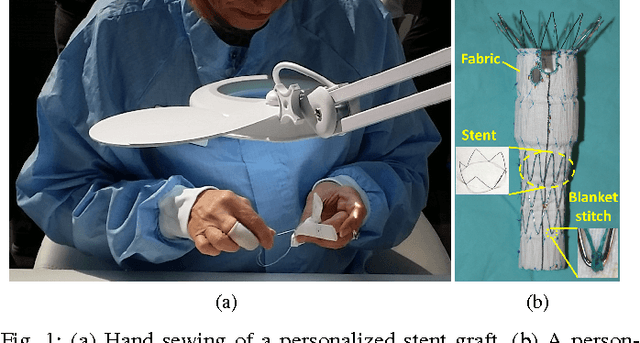
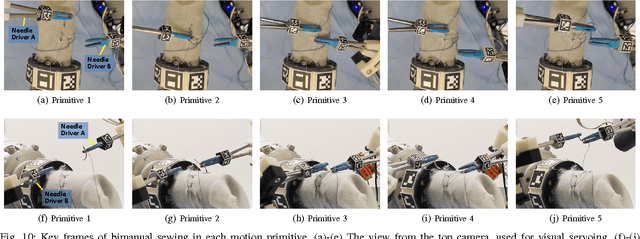
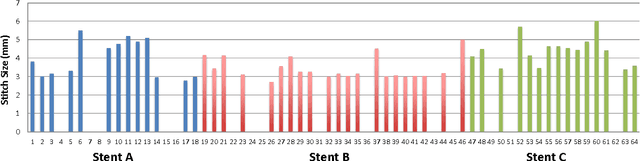

This paper presents a multi-robot system for manufacturing personalized medical stent grafts. The proposed system adopts a modular design, which includes: a (personalized) mandrel module, a bimanual sewing module, and a vision module. The mandrel module incorporates the personalized geometry of patients, while the bimanual sewing module adopts a learning-by-demonstration approach to transfer human hand-sewing skills to the robots. The human demonstrations were firstly observed by the vision module and then encoded using a statistical model to generate the reference motion trajectories. During autonomous robot sewing, the vision module plays the role of coordinating multi-robot collaboration. Experiment results show that the robots can adapt to generalized stent designs. The proposed system can also be used for other manipulation tasks, especially for flexible production of customized products and where bimanual or multi-robot cooperation is required.