 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Learning-Based Tune-Free Control Framework for Large Scale Autonomous Driving System Deployment
Paper and Code
Nov 09, 2020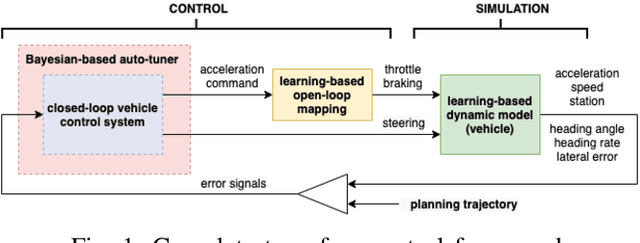
This paper presents the design of a tune-free (human-out-of-the-loop parameter tuning) control framework, aiming at accelerating large scale autonomous driving system deployed on various vehicles and driving environments. The framework consists of three machine-learning-based procedures, which jointly automate the control parameter tuning for autonomous driving, including: a learning-based dynamic modeling procedure, to enable the control-in-the-loop simulation with highly accurate vehicle dynamics for parameter tuning; a learning-based open-loop mapping procedure, to solve the feedforward control parameters tuning; and more significantly, a Bayesian-optimization-based closed-loop parameter tuning procedure, to automatically tune feedback control (PID, LQR, MRAC, MPC, etc.) parameters in simulation environment. The paper shows an improvement in control performance with a significant increase in parameter tuning efficiency, in both simulation and road tests. This framework has been validated on different vehicles in US and China.