 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Configuration-Space Decomposition Scheme for Learning-based Collision Checking
Paper and Code
Nov 17, 2019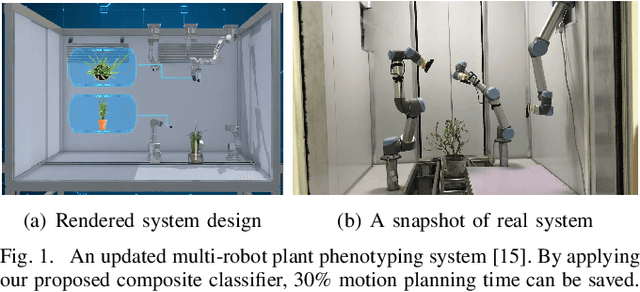
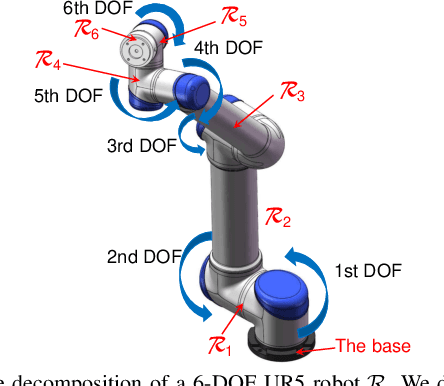
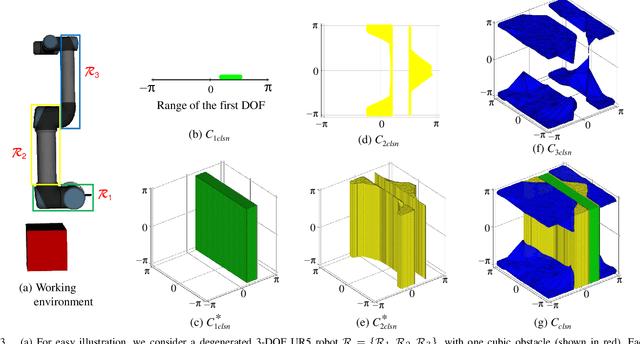
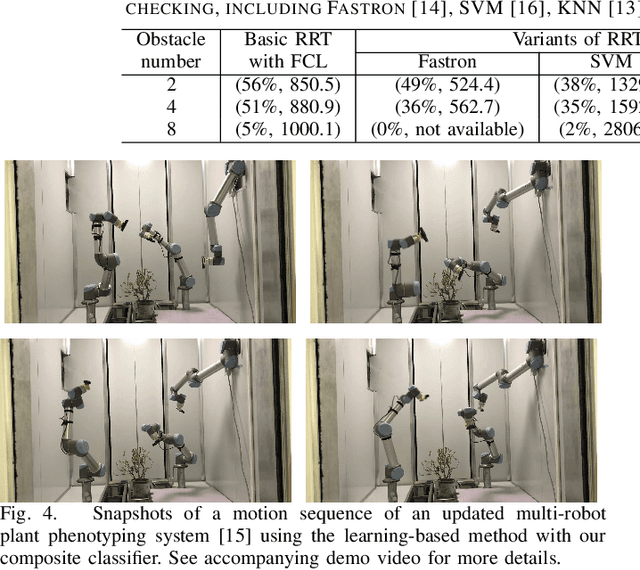
Motion planning for robots of high degrees-of-freedom (DOFs) is an important problem in robotics with sampling-based methods in configuration space C as one popular solution. Recently, machine learning methods have been introduced into sampling-based motion planning methods, which train a classifier to distinguish collision free subspace from in-collision subspace in C. In this paper, we propose a novel configuration space decomposition method and show two nice properties resulted from this decomposition. Using these two properties, we build a composite classifier that works compatibly with previous machine learning methods by using them as the elementary classifiers. Experimental results are presented, showing that our composite classifier outperforms state-of-the-art single classifier methods by a large margin. A real application of motion planning in a multi-robot system in plant phenotyping using three UR5 robotic arms is also presented.