 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D Multi-Object Tracking with Semi-Supervised GRU-Kalman Filter
Paper and Code
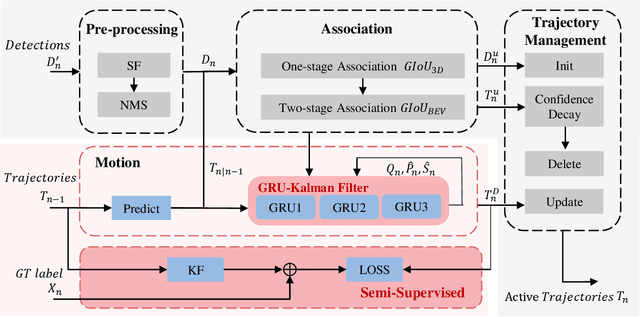
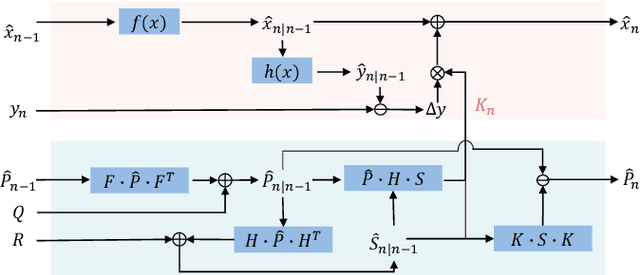
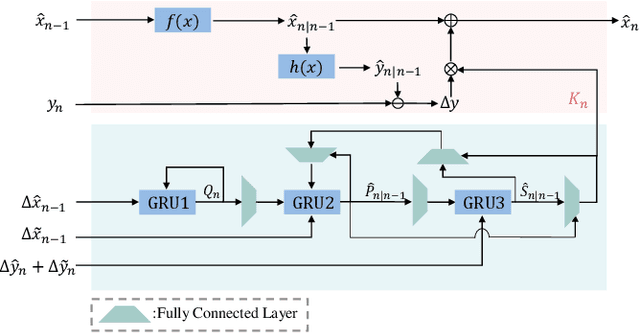
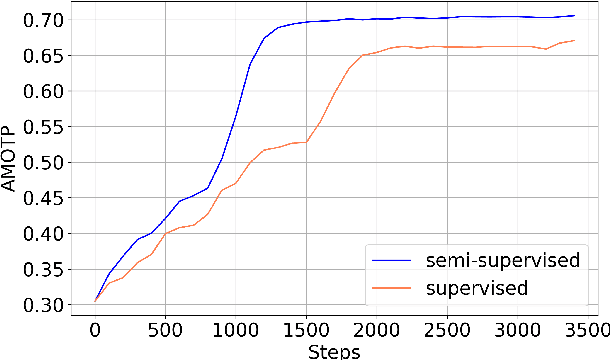
3D Multi-Object Tracking (MOT), a fundamental component of environmental perception, is essential for intelligent systems like autonomous driving and robotic sensing. Although Tracking-by-Detection frameworks have demonstrated excellent performance in recent years, their application in real-world scenarios faces significant challenges. Object movement in complex environments is often highly nonlinear, while existing methods typically rely on linear approximations of motion. Furthermore, system noise is frequently modeled as a Gaussian distribution, which fails to capture the true complexity of the noise dynamics. These oversimplified modeling assumptions can lead to significant reductions in tracking precision. To address this, we propose a GRU-based MOT method, which introduces a learnable Kalman filter into the motion module. This approach is able to learn object motion characteristics through data-driven learning, thereby avoiding the need for manual model design and model error. At the same time, to avoid abnormal supervision caused by the wrong association between annotations and trajectories, we design a semi-supervised learning strategy to accelerate the convergence speed and improve the robustness of the model. Evaluation experiment on the nuScenes and Argoverse2 datasets demonstrates that our system exhibits superior performance and significant potential compared to traditional TBD methods.