 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D Brain Reconstruction by Hierarchical Shape-Perception Network from a Single Incomplete Image
Paper and Code
Jul 23, 2021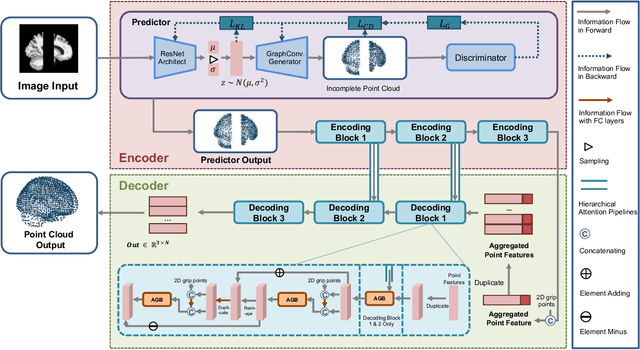
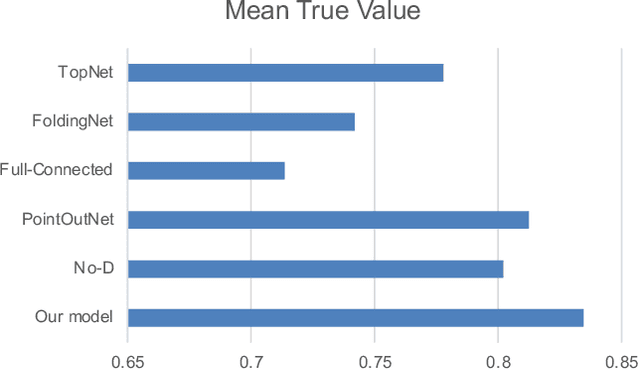
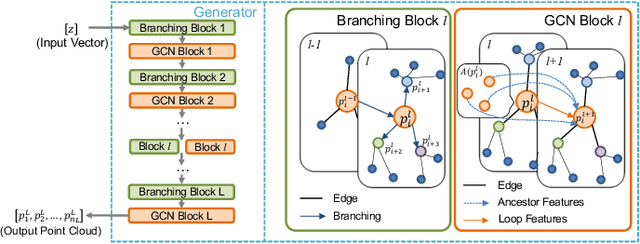
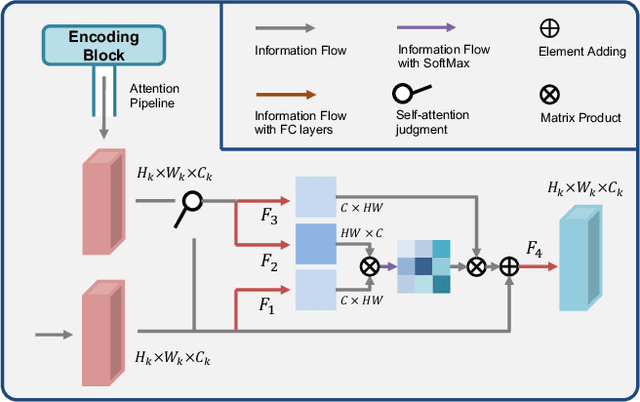
3D shape reconstruction is essential in the navigation of minimally-invasive and auto robot-guided surgeries whose operating environments are indirect and narrow, and there have been some works that focused on reconstructing the 3D shape of the surgical organ through limited 2D information available. However, the lack and incompleteness of such information caused by intraoperative emergencies (such as bleeding) and risk control conditions have not been considered. In this paper, a novel hierarchical shape-perception network (HSPN) is proposed to reconstruct the 3D point clouds (PCs) of specific brains from one single incomplete image with low latency. A tree-structured predictor and several hierarchical attention pipelines are constructed to generate point clouds that accurately describe the incomplete images and then complete these point clouds with high quality. Meanwhile, attention gate blocks (AGBs) are designed to efficiently aggregate geometric local features of incomplete PCs transmitted by hierarchical attention pipelines and internal features of reconstructing point clouds. With the proposed HSPN, 3D shape perception and completion can be achieved spontaneously. Comprehensive results measured by Chamfer distance and PC-to-PC error demonstrate that the performance of the proposed HSPN outperforms other competitive methods in terms of qualitative displays, quantitative experiment, and classification evaluation.