 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Real-time Degeneracy Sensing and Compensation Method for Enhanced LiDAR SLAM
Dec 10, 2024



LiDAR is widely used in Simultaneous Localization and Mapping (SLAM) and autonomous driving. The LiDAR odometry is of great importance in multi-sensor fusion. However, in some unstructured environments, the point cloud registration cannot constrain the poses of the LiDAR due to its sparse geometric features, which leads to the degeneracy of multi-sensor fusion accuracy. To address this problem, we propose a novel real-time approach to sense and compensate for the degeneracy of LiDAR. Firstly, this paper introduces the degeneracy factor with clear meaning, which can measure the degeneracy of LiDAR. Then, the Density-Based Spatial Clustering of Applications with Noise (DBSCAN) clustering method adaptively perceives the degeneracy with better environmental generalization. Finally, the degeneracy perception results are utilized to fuse LiDAR and IMU, thus effectively resisting degeneracy effects. Experiments on our dataset show the method's high accuracy and robustness and validate our algorithm's adaptability to different environments and LiDAR scanning modalities.
AS-LIO: Spatial Overlap Guided Adaptive Sliding Window LiDAR-Inertial Odometry for Aggressive FOV Variation
Aug 21, 2024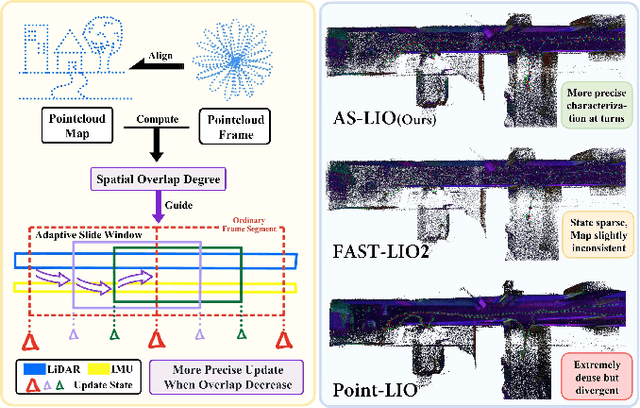
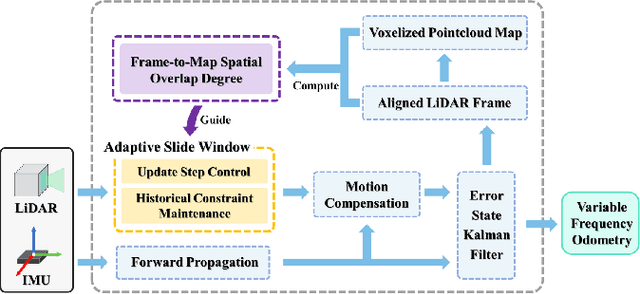
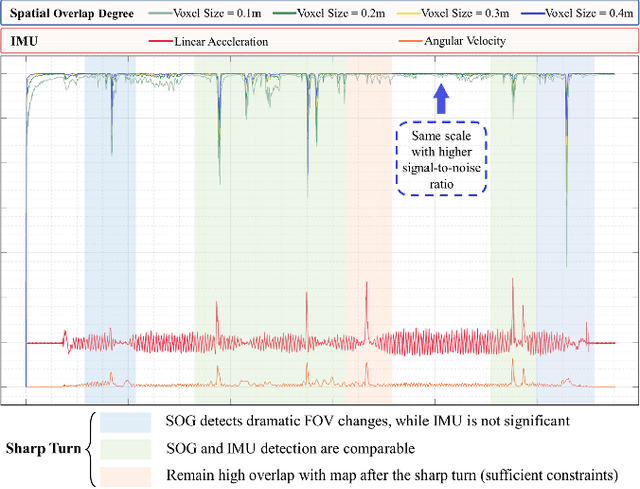
LiDAR-Inertial Odometry (LIO) demonstrates outstanding accuracy and stability in general low-speed and smooth motion scenarios. However, in high-speed and intense motion scenarios, such as sharp turns, two primary challenges arise: firstly, due to the limitations of IMU frequency, the error in estimating significantly non-linear motion states escalates; secondly, drastic changes in the Field of View (FOV) may diminish the spatial overlap between LiDAR frame and pointcloud map (or between frames), leading to insufficient data association and constraint degradation. To address these issues, we propose a novel Adaptive Sliding window LIO framework (AS-LIO) guided by the Spatial Overlap Degree (SOD). Initially, we assess the SOD between the LiDAR frames and the registered map, directly evaluating the adverse impact of current FOV variation on pointcloud alignment. Subsequently, we design an adaptive sliding window to manage the continuous LiDAR stream and control state updates, dynamically adjusting the update step according to the SOD. This strategy enables our odometry to adaptively adopt higher update frequency to precisely characterize trajectory during aggressive FOV variation, thus effectively reducing the non-linear error in positioning. Meanwhile, the historical constraints within the sliding window reinforce the frame-to-map data association, ensuring the robustness of state estimation. Experiments show that our AS-LIO framework can quickly perceive and respond to challenging FOV change, outperforming other state-of-the-art LIO frameworks in terms of accuracy and robustness.