 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLLM-based Personalized Portfolio Recommender: Integrating Large Language Models and Reinforcement Learning for Intelligent Investment Strategy Optimization
Dec 15, 2025In modern financial markets, investors increasingly seek personalized and adaptive portfolio strategies that reflect their individual risk preferences and respond to dynamic market conditions. Traditional rule-based or static optimization approaches often fail to capture the nonlinear interactions among investor behavior, market volatility, and evolving financial objectives. To address these limitations, this paper introduces the LLM-based Personalized Portfolio Recommender , an integrated framework that combines Large Language Models, reinforcement learning, and individualized risk preference modeling to support intelligent investment decision-making.
DeepPerception: Advancing R1-like Cognitive Visual Perception in MLLMs for Knowledge-Intensive Visual Grounding
Mar 17, 2025Human experts excel at fine-grained visual discrimination by leveraging domain knowledge to refine perceptual features, a capability that remains underdeveloped in current Multimodal Large Language Models (MLLMs). Despite possessing vast expert-level knowledge, MLLMs struggle to integrate reasoning into visual perception, often generating direct responses without deeper analysis. To bridge this gap, we introduce knowledge-intensive visual grounding (KVG), a novel visual grounding task that requires both fine-grained perception and domain-specific knowledge integration. To address the challenges of KVG, we propose DeepPerception, an MLLM enhanced with cognitive visual perception capabilities. Our approach consists of (1) an automated data synthesis pipeline that generates high-quality, knowledge-aligned training samples, and (2) a two-stage training framework combining supervised fine-tuning for cognitive reasoning scaffolding and reinforcement learning to optimize perception-cognition synergy. To benchmark performance, we introduce KVG-Bench a comprehensive dataset spanning 10 domains with 1.3K manually curated test cases. Experimental results demonstrate that DeepPerception significantly outperforms direct fine-tuning, achieving +8.08\% accuracy improvements on KVG-Bench and exhibiting +4.60\% superior cross-domain generalization over baseline approaches. Our findings highlight the importance of integrating cognitive processes into MLLMs for human-like visual perception and open new directions for multimodal reasoning research. The data, codes, and models are released at https://github.com/thunlp/DeepPerception.
At the Intersection of Deep Sequential Model Framework and State-space Model Framework: Study on Option Pricing
Dec 14, 2020
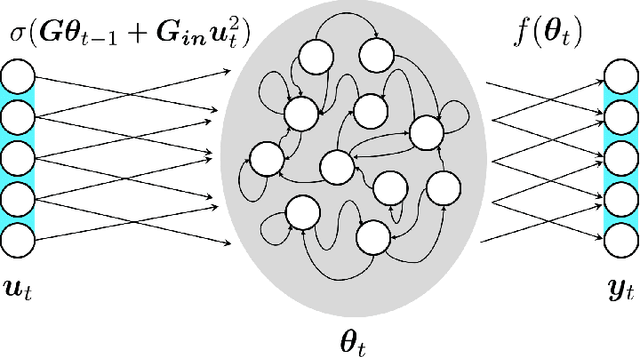


Inference and forecast problems of the nonlinear dynamical system have arisen in a variety of contexts. Reservoir computing and deep sequential models, on the one hand, have demonstrated efficient, robust, and superior performance in modeling simple and chaotic dynamical systems. However, their innate deterministic feature has partially detracted their robustness to noisy system, and their inability to offer uncertainty measurement has also been an insufficiency of the framework. On the other hand, the traditional state-space model framework is robust to noise. It also carries measured uncertainty, forming a just-right complement to the reservoir computing and deep sequential model framework. We propose the unscented reservoir smoother, a model that unifies both deep sequential and state-space models to achieve both frameworks' superiorities. Evaluated in the option pricing setting on top of noisy datasets, URS strikes highly competitive forecasting accuracy, especially those of longer-term, and uncertainty measurement. Further extensions and implications on URS are also discussed to generalize a full integration of both frameworks.