 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimization of Directional Landmark Deployment for Visual Observer on SE(3)
Mar 28, 2022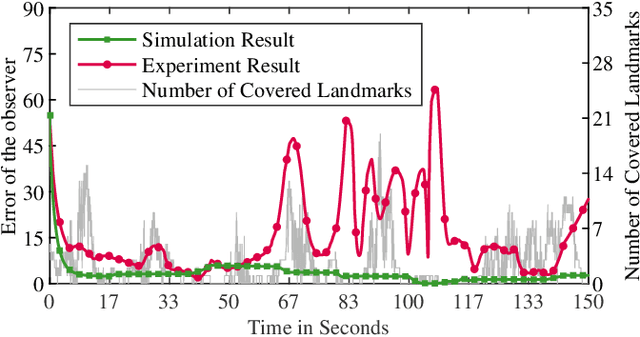
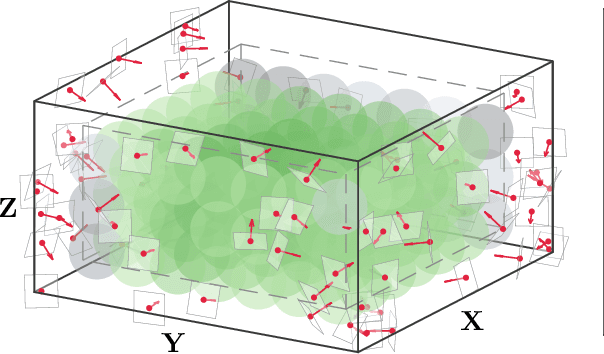
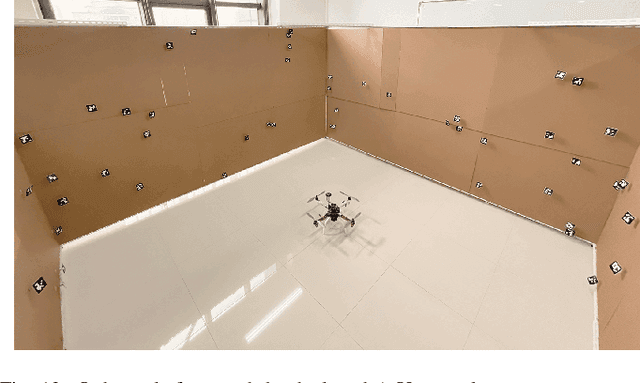
An optimization method is proposed in this paper for novel deployment of given number of directional landmarks (location and pose) within a given region in the 3-D task space. This new deployment technique is built on the geometric models of both landmarks and the monocular camera. In particular, a new concept of Multiple Coverage Probability (MCP) is defined to characterize the probability of at least n landmarks being covered simultaneously by a camera at a fixed position. The optimization is conducted with respect to the position and pose of the given number of landmarks to maximize MCP through globally exploration of the given 3-D space. By adopting the elimination genetic algorithm, the global optimal solutions can be obtained, which are then applied to improve the convergent performance of the visual observer on SE(3) as a demonstration example. Both simulation and experimental results are presented to validate the effectiveness of the proposed landmark deployment optimization method.