 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Localization-to-Segmentation Framework for Automatic Tumor Segmentation in Whole-Body PET/CT Images
Sep 14, 2023Fluorodeoxyglucose (FDG) positron emission tomography (PET) combined with computed tomography (CT) is considered the primary solution for detecting some cancers, such as lung cancer and melanoma. Automatic segmentation of tumors in PET/CT images can help reduce doctors' workload, thereby improving diagnostic quality. However, precise tumor segmentation is challenging due to the small size of many tumors and the similarity of high-uptake normal areas to the tumor regions. To address these issues, this paper proposes a localization-to-segmentation framework (L2SNet) for precise tumor segmentation. L2SNet first localizes the possible lesions in the lesion localization phase and then uses the location cues to shape the segmentation results in the lesion segmentation phase. To further improve the segmentation performance of L2SNet, we design an adaptive threshold scheme that takes the segmentation results of the two phases into consideration. The experiments with the MICCAI 2023 Automated Lesion Segmentation in Whole-Body FDG-PET/CT challenge dataset show that our method achieved a competitive result and was ranked in the top 7 methods on the preliminary test set. Our work is available at: https://github.com/MedCAI/L2SNet.
3D Vision-guided Pick-and-Place Using Kuka LBR iiwa Robot
Feb 23, 2021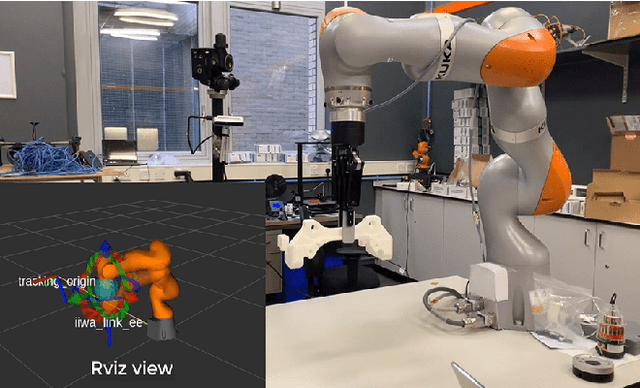
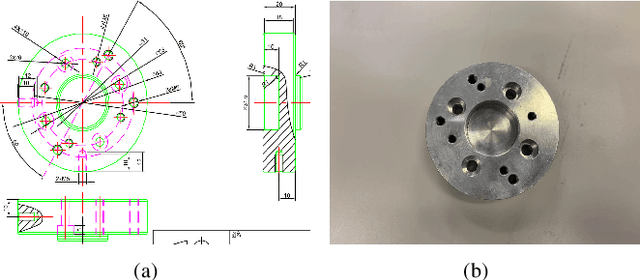
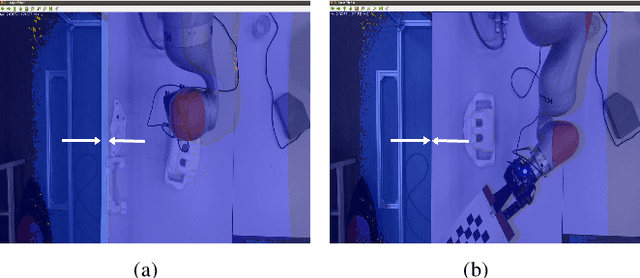
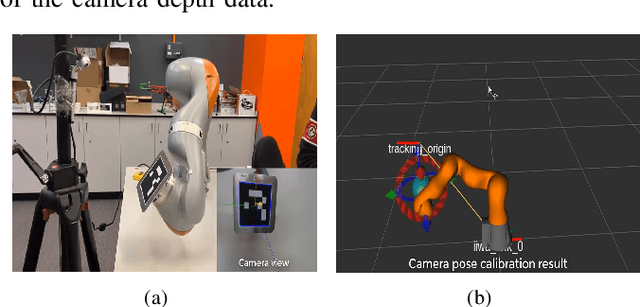
This paper presents the development of a control system for vision-guided pick-and-place tasks using a robot arm equipped with a 3D camera. The main steps include camera intrinsic and extrinsic calibration, hand-eye calibration, initial object pose registration, objects pose alignment algorithm, and pick-and-place execution. The proposed system allows the robot be able to to pick and place object with limited times of registering a new object and the developed software can be applied for new object scenario quickly. The integrated system was tested using the hardware combination of kuka iiwa, Robotiq grippers (two finger gripper and three finger gripper) and 3D cameras (Intel realsense D415 camera, Intel realsense D435 camera, Microsoft Kinect V2). The whole system can also be modified for the combination of other robotic arm, gripper and 3D camera.