 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLabel Encoding for Regression Networks
Dec 04, 2022



Deep neural networks are used for a wide range of regression problems. However, there exists a significant gap in accuracy between specialized approaches and generic direct regression in which a network is trained by minimizing the squared or absolute error of output labels. Prior work has shown that solving a regression problem with a set of binary classifiers can improve accuracy by utilizing well-studied binary classification algorithms. We introduce binary-encoded labels (BEL), which generalizes the application of binary classification to regression by providing a framework for considering arbitrary multi-bit values when encoding target values. We identify desirable properties of suitable encoding and decoding functions used for the conversion between real-valued and binary-encoded labels based on theoretical and empirical study. These properties highlight a tradeoff between classification error probability and error-correction capabilities of label encodings. BEL can be combined with off-the-shelf task-specific feature extractors and trained end-to-end. We propose a series of sample encoding, decoding, and training loss functions for BEL and demonstrate they result in lower error than direct regression and specialized approaches while being suitable for a diverse set of regression problems, network architectures, and evaluation metrics. BEL achieves state-of-the-art accuracies for several regression benchmarks. Code is available at https://github.com/ubc-aamodt-group/BEL_regression.
* Published at ICLR 2022
Characterizing and Improving the Resilience of Accelerators in Autonomous Robots
Oct 17, 2021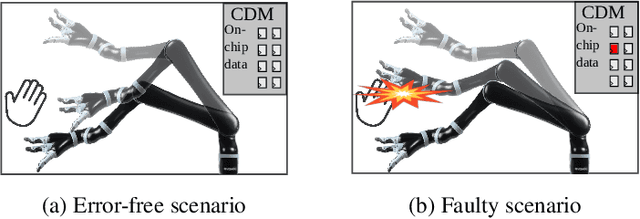
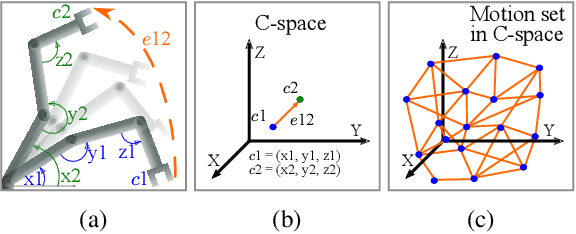
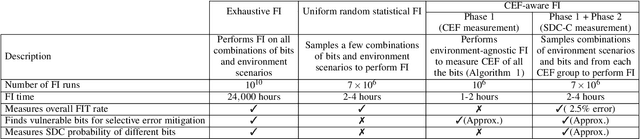
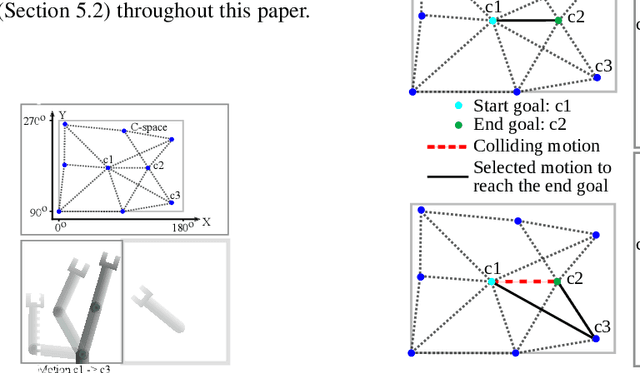
Motion planning is a computationally intensive and well-studied problem in autonomous robots. However, motion planning hardware accelerators (MPA) must be soft-error resilient for deployment in safety-critical applications, and blanket application of traditional mitigation techniques is ill-suited due to cost, power, and performance overheads. We propose Collision Exposure Factor (CEF), a novel metric to assess the failure vulnerability of circuits processing spatial relationships, including motion planning. CEF is based on the insight that the safety violation probability increases with the surface area of the physical space exposed by a bit-flip. We evaluate CEF on four MPAs. We demonstrate empirically that CEF is correlated with safety violation probability, and that CEF-aware selective error mitigation provides 12.3x, 9.6x, and 4.2x lower Failures-In-Time (FIT) rate on average for the same amount of protected memory compared to uniform, bit-position, and access-frequency-aware selection of critical data. Furthermore, we show how to employ CEF to enable fault characterization using 23,000x fewer fault injection (FI) experiments than exhaustive FI, and evaluate our FI approach on different robots and MPAs. We demonstrate that CEF-aware FI can provide insights on vulnerable bits in an MPA while taking the same amount of time as uniform statistical FI. Finally, we use the CEF to formulate guidelines for designing soft-error resilient MPAs.
Robust Counterfactual Explanations on Graph Neural Networks
Jul 16, 2021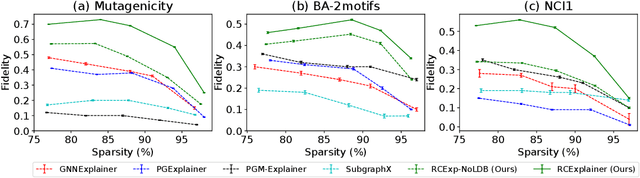

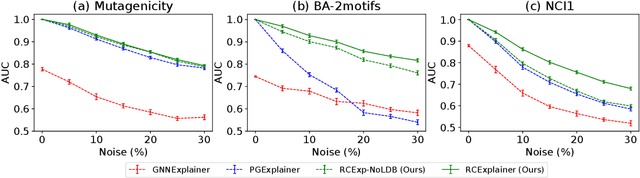
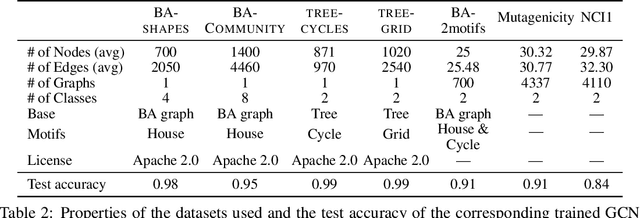
Massive deployment of Graph Neural Networks (GNNs) in high-stake applications generates a strong demand for explanations that are robust to noise and align well with human intuition. Most existing methods generate explanations by identifying a subgraph of an input graph that has a strong correlation with the prediction. These explanations are not robust to noise because independently optimizing the correlation for a single input can easily overfit noise. Moreover, they do not align well with human intuition because removing an identified subgraph from an input graph does not necessarily change the prediction result. In this paper, we propose a novel method to generate robust counterfactual explanations on GNNs by explicitly modelling the common decision logic of GNNs on similar input graphs. Our explanations are naturally robust to noise because they are produced from the common decision boundaries of a GNN that govern the predictions of many similar input graphs. The explanations also align well with human intuition because removing the set of edges identified by an explanation from the input graph changes the prediction significantly. Exhaustive experiments on many public datasets demonstrate the superior performance of our method.