 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInvertible Tone Mapping with Selectable Styles
Oct 09, 2021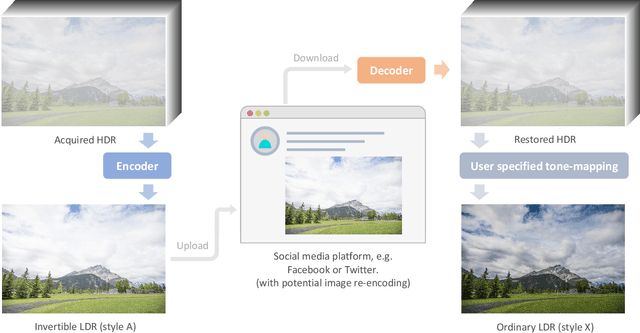
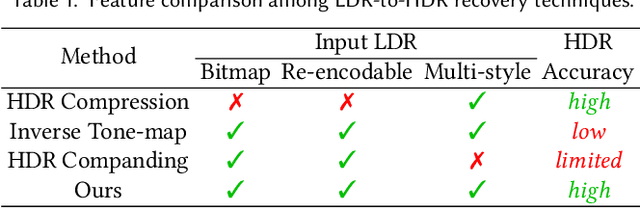
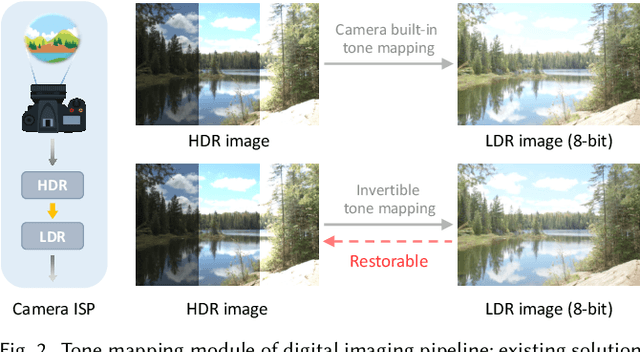
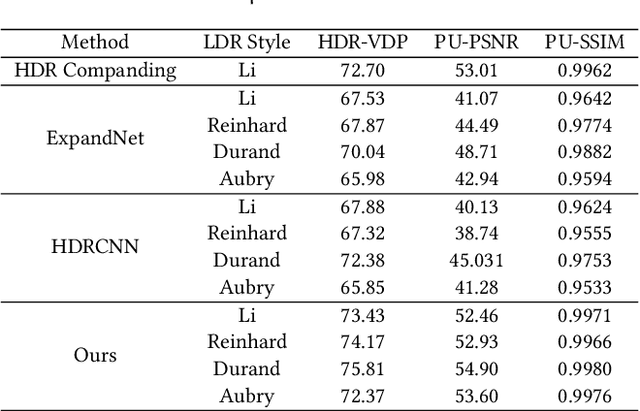
Although digital cameras can acquire high-dynamic range (HDR) images, the captured HDR information are mostly quantized to low-dynamic range (LDR) images for display compatibility and compact storage. In this paper, we propose an invertible tone mapping method that converts the multi-exposure HDR to a true LDR (8-bit per color channel) and reserves the capability to accurately restore the original HDR from this {\em invertible LDR}. Our invertible LDR can mimic the appearance of a user-selected tone mapping style. It can be shared over any existing social network platforms that may re-encode or format-convert the uploaded images, without much hurting the accuracy of the restored HDR counterpart. To achieve this, we regard the tone mapping and the restoration as coupled processes, and formulate them as an encoding-and-decoding problem through convolutional neural networks. Particularly, our model supports pluggable style modulators, each of which bakes a specific tone mapping style, and thus favors the application flexibility. Our method is evaluated with a rich variety of HDR images and multiple tone mapping operators, which shows the superiority over relevant state-of-the-art methods. Also, we conduct ablation study to justify our design and discuss the robustness and generality toward real applications.
DeepTag: A General Framework for Fiducial Marker Design and Detection
May 28, 2021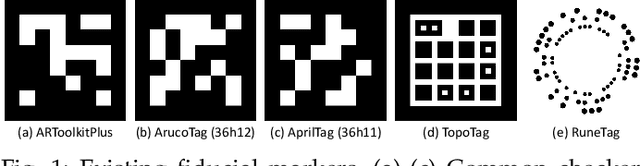

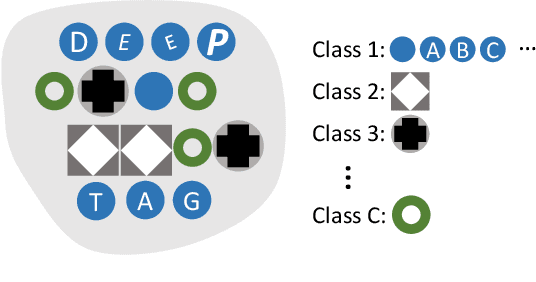
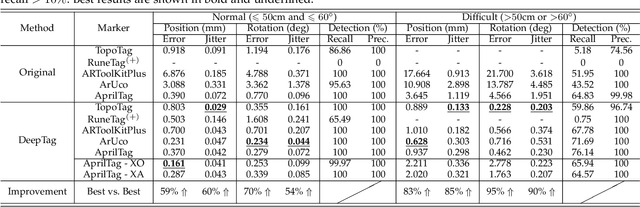
A fiducial marker system usually consists of markers, a detection algorithm, and a coding system. The appearance of markers and the detection robustness are generally limited by the existing detection algorithms, which are hand-crafted with traditional low-level image processing techniques. Furthermore, a sophisticatedly designed coding system is required to overcome the shortcomings of both markers and detection algorithms. To improve the flexibility and robustness in various applications, we propose a general deep learning based framework, DeepTag, for fiducial marker design and detection. DeepTag not only supports detection of a wide variety of existing marker families, but also makes it possible to design new marker families with customized local patterns. Moreover, we propose an effective procedure to synthesize training data on the fly without manual annotations. Thus, DeepTag can easily adapt to existing and newly-designed marker families. To validate DeepTag and existing methods, beside existing datasets, we further collect a new large and challenging dataset where markers are placed in different view distances and angles. Experiments show that DeepTag well supports different marker families and greatly outperforms the existing methods in terms of both detection robustness and pose accuracy. Both code and dataset are available at \url{https://herohuyongtao.github.io/research/publications/deep-tag/}.
Binocular Tone Mapping with Improved Overall Contrast and Local Details
Sep 17, 2018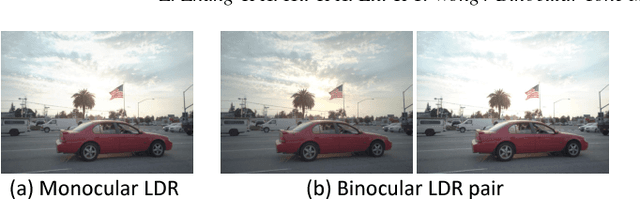
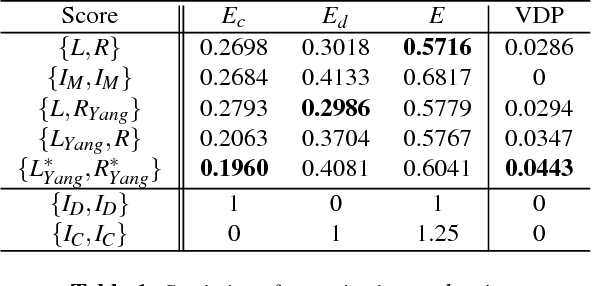
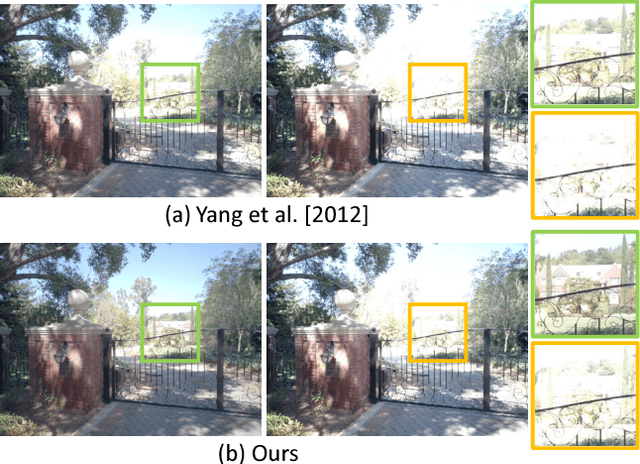
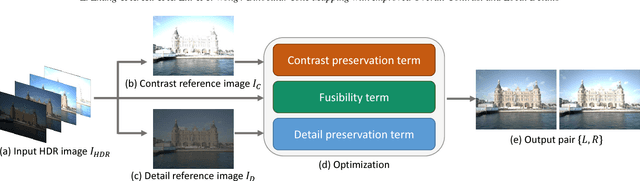
Tone mapping is a commonly used technique that maps the set of colors in high-dynamic-range (HDR) images to another set of colors in low-dynamic-range (LDR) images, to fit the need for print-outs, LCD monitors and projectors. Unfortunately, during the compression of dynamic range, the overall contrast and local details generally cannot be preserved simultaneously. Recently, with the increased use of stereoscopic devices, the notion of binocular tone mapping has been proposed in the existing research study. However, the existing research lacks the binocular perception study and is unable to generate the optimal binocular pair that presents the most visual content. In this paper, we propose a novel perception-based binocular tone mapping method, that can generate an optimal binocular image pair (generating left and right images simultaneously) from an HDR image that presents the most visual content by designing a binocular perception metric. Our method outperforms the existing method in terms of both visual and time performance.
* Accepted by Pacific Graphics 2018