 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCEFW: A Comprehensive Evaluation Framework for Watermark in Large Language Models
Mar 24, 2025Text watermarking provides an effective solution for identifying synthetic text generated by large language models. However, existing techniques often focus on satisfying specific criteria while ignoring other key aspects, lacking a unified evaluation. To fill this gap, we propose the Comprehensive Evaluation Framework for Watermark (CEFW), a unified framework that comprehensively evaluates watermarking methods across five key dimensions: ease of detection, fidelity of text quality, minimal embedding cost, robustness to adversarial attacks, and imperceptibility to prevent imitation or forgery. By assessing watermarks according to all these key criteria, CEFW offers a thorough evaluation of their practicality and effectiveness. Moreover, we introduce a simple and effective watermarking method called Balanced Watermark (BW), which guarantees robustness and imperceptibility through balancing the way watermark information is added. Extensive experiments show that BW outperforms existing methods in overall performance across all evaluation dimensions. We release our code to the community for future research. https://github.com/DrankXs/BalancedWatermark.
Safe Learning-Based Feedback Linearization Tracking Control for Nonlinear System with Event-Triggered Model Update
Mar 07, 2022


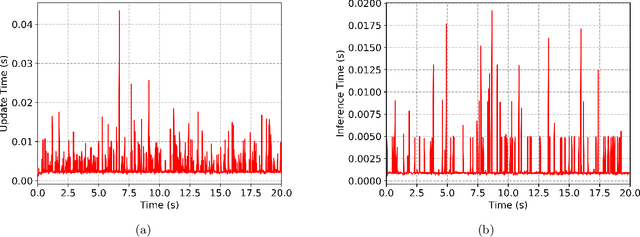
Learning-based methods are powerful in handling complex scenarios. However, it is still challenging to use learning-based methods under uncertain environments while stability, safety, and real-time performance of the system are desired to guarantee. In this paper, we propose a learning-based tracking control scheme based on a feedback linearization controller in which uncertain disturbances are approximated online using Gaussian Processes (GPs). Using the predicted distribution of disturbances given by GPs, a Control Lyapunov Function (CLF) and Control Barrier Function (CBF) based Quadratic Program is applied, with which probabilistic stability and safety are guaranteed. In addition, the trajectory is optimized first by Model Predictive Control (MPC) based on the linearized dynamics systems to further reduce the tracking error. We also design an event trigger for GPs updates to improve efficiency while stability and safety of the system are still guaranteed. The effectiveness of the proposed tracking control strategy is illustrated in numerical simulations.
* 8 pages, 8 figures
Safe Learning-based Gradient-free Model Predictive Control Based on Cross-entropy Method
Feb 28, 2021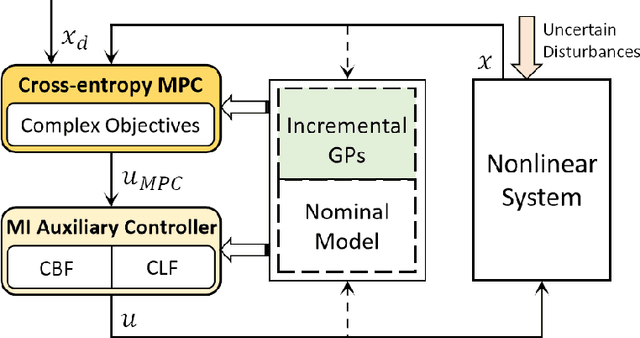


In this paper, a safe and learning-based control framework for model predictive control (MPC) is proposed to optimize nonlinear systems with a gradient-free objective function under uncertain environmental disturbances. The control framework integrates a learning-based MPC with an auxiliary controller in a way of minimal intervention. The learning-based MPC augments the prior nominal model with incremental Gaussian Processes to learn the uncertain disturbances. The cross-entropy method (CEM) is utilized as the sampling-based optimizer for the MPC with a gradient-free objective function. A minimal intervention controller is devised with a control Lyapunov function and a control barrier function to guide the sampling process and endow the system with high probabilistic safety. The proposed algorithm shows a safe and adaptive control performance on a simulated quadrotor in the tasks of trajectory tracking and obstacle avoidance under uncertain wind disturbances.