 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning-based Predictive Path Following Control for Nonlinear Systems Under Uncertain Disturbances
Dec 26, 2022



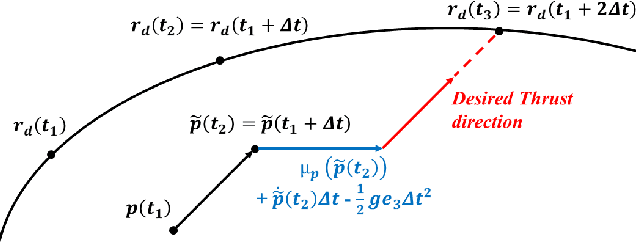
Accurate path following is challenging for autonomous robots operating in uncertain environments. Adaptive and predictive control strategies are crucial for a nonlinear robotic system to achieve high-performance path following control. In this paper, we propose a novel learning-based predictive control scheme that couples a high-level model predictive path following controller (MPFC) with a low-level learning-based feedback linearization controller (LB-FBLC) for nonlinear systems under uncertain disturbances. The low-level LB-FBLC utilizes Gaussian Processes to learn the uncertain environmental disturbances online and tracks the reference state accurately with a probabilistic stability guarantee. Meanwhile, the high-level MPFC exploits the linearized system model augmented with a virtual linear path dynamics model to optimize the evolution of path reference targets, and provides the reference states and controls for the low-level LB-FBLC. Simulation results illustrate the effectiveness of the proposed control strategy on a quadrotor path following task under unknown wind disturbances.
Safe Learning-based Gradient-free Model Predictive Control Based on Cross-entropy Method
Feb 28, 2021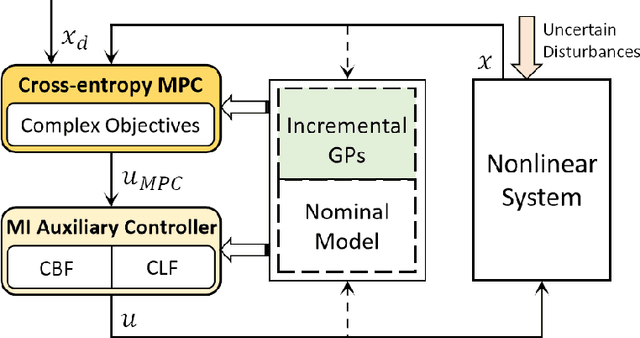


In this paper, a safe and learning-based control framework for model predictive control (MPC) is proposed to optimize nonlinear systems with a gradient-free objective function under uncertain environmental disturbances. The control framework integrates a learning-based MPC with an auxiliary controller in a way of minimal intervention. The learning-based MPC augments the prior nominal model with incremental Gaussian Processes to learn the uncertain disturbances. The cross-entropy method (CEM) is utilized as the sampling-based optimizer for the MPC with a gradient-free objective function. A minimal intervention controller is devised with a control Lyapunov function and a control barrier function to guide the sampling process and endow the system with high probabilistic safety. The proposed algorithm shows a safe and adaptive control performance on a simulated quadrotor in the tasks of trajectory tracking and obstacle avoidance under uncertain wind disturbances.
Learning-Based Safety-Stability-Driven Control for Safety-Critical Systems under Model Uncertainties
Sep 15, 2020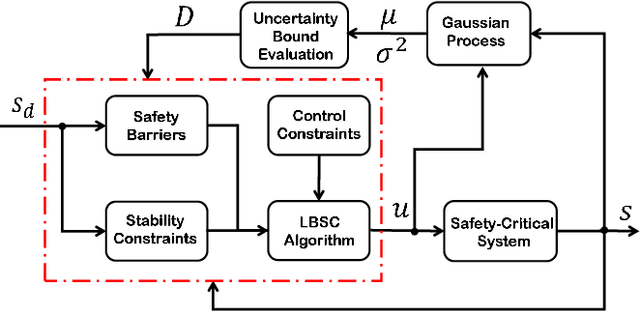
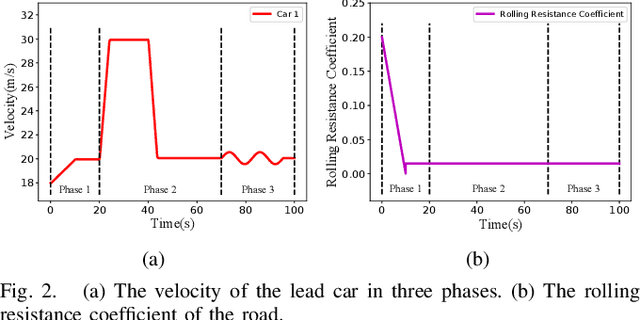


Safety and tracking stability are crucial for safety-critical systems such as self-driving cars, autonomous mobile robots, industrial manipulators. To efficiently control safety-critical systems to ensure their safety and achieve tracking stability, accurate system dynamic models are usually required. However, accurate system models are not always available in practice. In this paper, a learning-based safety-stability-driven control (LBSC) algorithm is presented to guarantee the safety and tracking stability for nonlinear safety-critical systems subject to control input constraints under model uncertainties. Gaussian Processes (GPs) are employed to learn the model error between the nominal model and the actual system dynamics, and the estimated mean and variance of the model error are used to quantify a high-confidence uncertainty bound. Using this estimated uncertainty bound, a safety barrier constraint is devised to ensure safety, and a stability constraint is developed to achieve rapid and accurate tracking. Then the proposed LBSC method is formulated as a quadratic program incorporating the safety barrier, the stability constraint, and the control constraints. The effectiveness of the LBSC method is illustrated on the safety-critical connected cruise control (CCC) system simulator under model uncertainties.
Safe Online Learning Tracking Control for Quadrotors under Wind Disturbances
Sep 08, 2020


Enforcing safety on precise trajectory tracking is critical for aerial robotics subject to wind disturbances. In this paper, we present a learning-based safety-preserving cascaded quadratic programming control (SPQC) for safe trajectory tracking under wind disturbances. The SPQC controller consists of a position-level controller and an attitude-level controller. Gaussian Processes (GPs) are utilized to estimate the uncertainties caused by wind disturbances, and then a nominal Lyapunov-based cascaded quadratic program (QP) controller is designed to track the reference trajectory. To avoid unexpected obstacles when tracking, safety constraints represented by control barrier functions (CBFs) are enforced on each nominal QP controller in a way of minimal modification. The performance of the proposed SPQC controller is illustrated through numerical validations of (a) trajectory tracking under different wind disturbances, and (b) trajectory tracking in a cluttered environment with a dense time-varying obstacle field under wind disturbances.