 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGSLAMOT: A Tracklet and Query Graph-based Simultaneous Locating, Mapping, and Multiple Object Tracking System
Aug 17, 2024For interacting with mobile objects in unfamiliar environments, simultaneously locating, mapping, and tracking the 3D poses of multiple objects are crucially required. This paper proposes a Tracklet Graph and Query Graph-based framework, i.e., GSLAMOT, to address this challenge. GSLAMOT utilizes camera and LiDAR multimodal information as inputs and divides the representation of the dynamic scene into a semantic map for representing the static environment, a trajectory of the ego-agent, and an online maintained Tracklet Graph (TG) for tracking and predicting the 3D poses of the detected mobile objects. A Query Graph (QG) is constructed in each frame by object detection to query and update TG. For accurate object association, a Multi-criteria Star Graph Association (MSGA) method is proposed to find matched objects between the detections in QG and the predicted tracklets in TG. Then, an Object-centric Graph Optimization (OGO) method is proposed to simultaneously optimize the TG, the semantic map, and the agent trajectory. It triangulates the detected objects into the map to enrich the map's semantic information. We address the efficiency issues to handle the three tightly coupled tasks in parallel. Experiments are conducted on KITTI, Waymo, and an emulated Traffic Congestion dataset that highlights challenging scenarios. Experiments show that GSLAMOT enables accurate crowded object tracking while conducting SLAM accurately in challenging scenarios, demonstrating more excellent performances than the state-of-the-art methods. The code and dataset are at https://gslamot.github.io.
A Hierarchical Neural Network for Sequence-to-Sequences Learning
Nov 23, 2018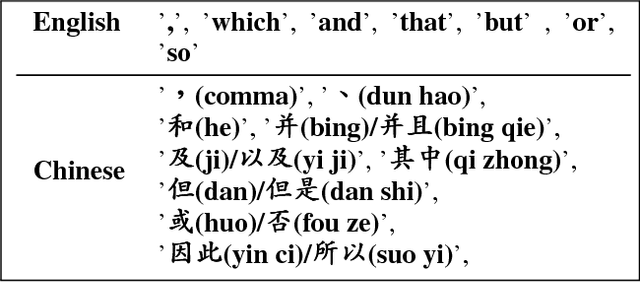
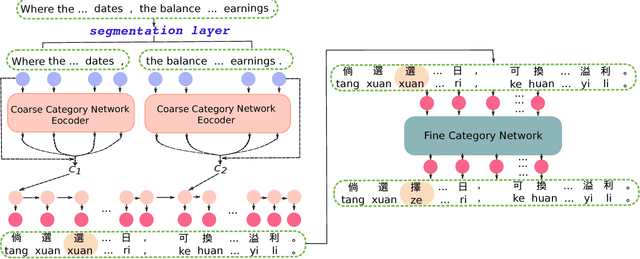
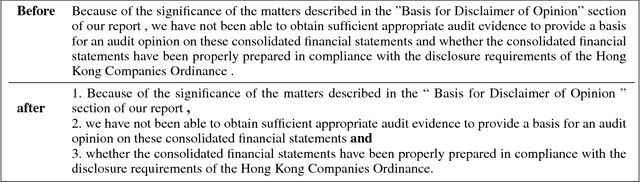
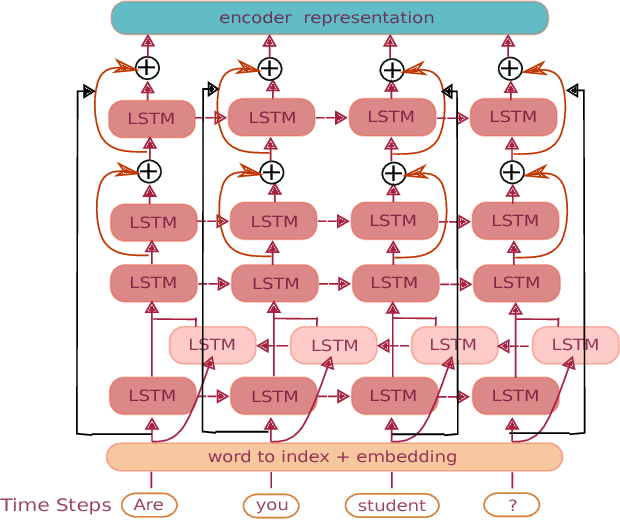
In recent years, the sequence-to-sequence learning neural networks with attention mechanism have achieved great progress. However, there are still challenges, especially for Neural Machine Translation (NMT), such as lower translation quality on long sentences. In this paper, we present a hierarchical deep neural network architecture to improve the quality of long sentences translation. The proposed network embeds sequence-to-sequence neural networks into a two-level category hierarchy by following the coarse-to-fine paradigm. Long sentences are input by splitting them into shorter sequences, which can be well processed by the coarse category network as the long distance dependencies for short sentences is able to be handled by network based on sequence-to-sequence neural network. Then they are concatenated and corrected by the fine category network. The experiments shows that our method can achieve superior results with higher BLEU(Bilingual Evaluation Understudy) scores, lower perplexity and better performance in imitating expression style and words usage than the traditional networks.