 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShowUI-Aloha: Human-Taught GUI Agent
Jan 12, 2026Graphical User Interfaces (GUIs) are central to human-computer interaction, yet automating complex GUI tasks remains a major challenge for autonomous agents, largely due to a lack of scalable, high-quality training data. While recordings of human demonstrations offer a rich data source, they are typically long, unstructured, and lack annotations, making them difficult for agents to learn from.To address this, we introduce ShowUI-Aloha, a comprehensive pipeline that transforms unstructured, in-the-wild human screen recordings from desktop environments into structured, actionable tasks. Our framework includes four key components: A recorder that captures screen video along with precise user interactions like mouse clicks, keystrokes, and scrolls. A learner that semantically interprets these raw interactions and the surrounding visual context, translating them into descriptive natural language captions. A planner that reads the parsed demonstrations, maintains task states, and dynamically formulates the next high-level action plan based on contextual reasoning. An executor that faithfully carries out these action plans at the OS level, performing precise clicks, drags, text inputs, and window operations with safety checks and real-time feedback. Together, these components provide a scalable solution for collecting and parsing real-world human data, demonstrating a viable path toward building general-purpose GUI agents that can learn effectively from simply observing humans.
Modeling Elastic-Body Dynamics of Fish Swimming Using a Variational Framework
Sep 19, 2025Fish-inspired aquatic robots are gaining increasing attention in research communities due to their high swimming speeds and efficient propulsion enabled by flexible bodies that generate undulatory motions. To support the design optimizations and control of such systems, accurate, interpretable, and computationally tractable modeling of the underlying swimming dynamics is indispensable. In this letter, we present a full-body dynamics model for fish swimming, rigorously derived from Hamilton's principle. The model captures the continuously distributed elasticity of a deformable fish body undergoing large deformations and incorporates fluid-structure coupling effects, enabling self-propelled motion without prescribing kinematics. A preliminary parameter study explores the influence of actuation frequency and body stiffness on swimming speed and cost of transport (COT). Simulation results indicate that swimming speed and energy efficiency exhibit opposing trends with tail-beat frequency and that both body stiffness and body length have distinct optimal values. These findings provide insights into biological swimming mechanisms and inform the design of high-performance soft robotic swimmers.
Dynamic Modeling and Efficient Data-Driven Optimal Control for Micro Autonomous Surface Vehicles
Sep 08, 2025Micro Autonomous Surface Vehicles (MicroASVs) offer significant potential for operations in confined or shallow waters and swarm robotics applications. However, achieving precise and robust control at such small scales remains highly challenging, mainly due to the complexity of modeling nonlinear hydrodynamic forces and the increased sensitivity to self-motion effects and environmental disturbances, including waves and boundary effects in confined spaces. This paper presents a physics-driven dynamics model for an over-actuated MicroASV and introduces a data-driven optimal control framework that leverages a weak formulation-based online model learning method. Our approach continuously refines the physics-driven model in real time, enabling adaptive control that adjusts to changing system parameters. Simulation results demonstrate that the proposed method substantially enhances trajectory tracking accuracy and robustness, even under unknown payloads and external disturbances. These findings highlight the potential of data-driven online learning-based optimal control to improve MicroASV performance, paving the way for more reliable and precise autonomous surface vehicle operations.
Transformers as Unsupervised Learning Algorithms: A study on Gaussian Mixtures
May 17, 2025The transformer architecture has demonstrated remarkable capabilities in modern artificial intelligence, among which the capability of implicitly learning an internal model during inference time is widely believed to play a key role in the under standing of pre-trained large language models. However, most recent works have been focusing on studying supervised learning topics such as in-context learning, leaving the field of unsupervised learning largely unexplored. This paper investigates the capabilities of transformers in solving Gaussian Mixture Models (GMMs), a fundamental unsupervised learning problem through the lens of statistical estimation. We propose a transformer-based learning framework called TGMM that simultaneously learns to solve multiple GMM tasks using a shared transformer backbone. The learned models are empirically demonstrated to effectively mitigate the limitations of classical methods such as Expectation-Maximization (EM) or spectral algorithms, at the same time exhibit reasonable robustness to distribution shifts. Theoretically, we prove that transformers can approximate both the EM algorithm and a core component of spectral methods (cubic tensor power iterations). These results bridge the gap between practical success and theoretical understanding, positioning transformers as versatile tools for unsupervised learning.
On Non-asymptotic Theory of Recurrent Neural Networks in Temporal Point Processes
Jun 02, 2024Temporal point process (TPP) is an important tool for modeling and predicting irregularly timed events across various domains. Recently, the recurrent neural network (RNN)-based TPPs have shown practical advantages over traditional parametric TPP models. However, in the current literature, it remains nascent in understanding neural TPPs from theoretical viewpoints. In this paper, we establish the excess risk bounds of RNN-TPPs under many well-known TPP settings. We especially show that an RNN-TPP with no more than four layers can achieve vanishing generalization errors. Our technical contributions include the characterization of the complexity of the multi-layer RNN class, the construction of $\tanh$ neural networks for approximating dynamic event intensity functions, and the truncation technique for alleviating the issue of unbounded event sequences. Our results bridge the gap between TPP's application and neural network theory.
Terrestrial Locomotion of PogoX: From Hardware Design to Energy Shaping and Step-to-step Dynamics Based Control
Sep 26, 2023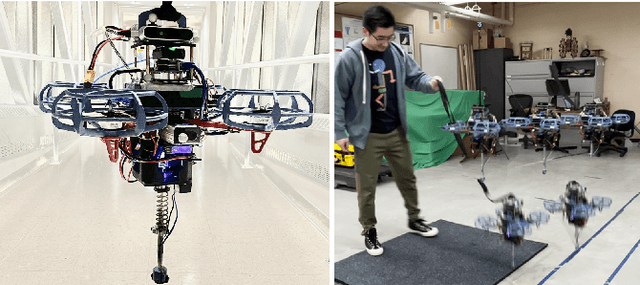
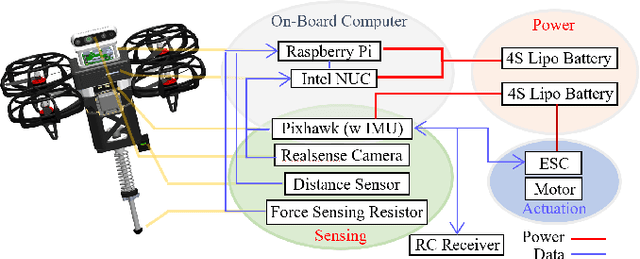
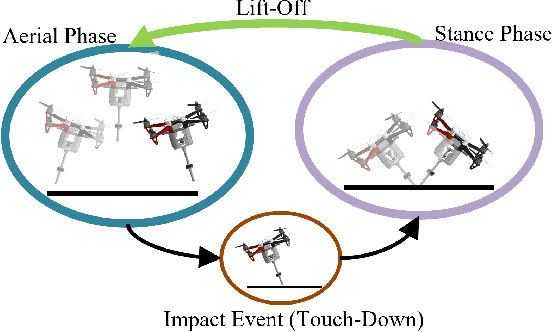
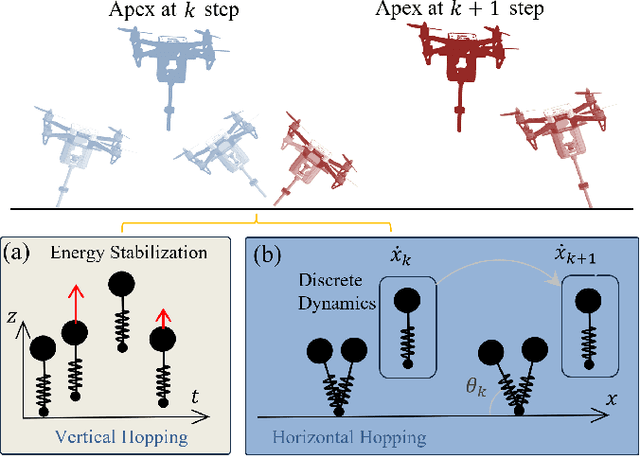
We present a novel controller design on a robotic locomotor that combines an aerial vehicle with a spring-loaded leg. The main motivation is to enable the terrestrial locomotion capability on aerial vehicles so that they can carry heavy loads: heavy enough that flying is no longer possible, e.g., when the thrust-to-weight ratio (TWR) is small. The robot is designed with a pogo-stick leg and a quadrotor, and thus it is named as PogoX. We show that with a simple and lightweight spring-loaded leg, the robot is capable of hopping with TWR $<1$. The control of hopping is realized via two components: a vertical height control via control Lyapunov function-based energy shaping, and a step-to-step (S2S) dynamics based horizontal velocity control that is inspired by the hopping of the Spring-Loaded Inverted Pendulum (SLIP). The controller is successfully realized on the physical robot, showing dynamic terrestrial locomotion of PogoX which can hop at variable heights and different horizontal velocities with robustness to ground height variations and external pushes.