 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimultaneous Ground Reaction Force and State Estimation via Constrained Moving Horizon Estimation
Nov 18, 2024Accurate ground reaction force (GRF) estimation can significantly improve the adaptability of legged robots in various real-world applications. For instance, with estimated GRF and contact kinematics, the locomotion control and planning assist the robot in overcoming uncertain terrains. The canonical momentum-based methods, formulated as nonlinear observers, do not fully address the noisy measurements and the dependence between floating base states and the generalized momentum dynamics. In this paper, we present a simultaneous ground reaction force and state estimation framework for legged robots, which systematically addresses the sensor noise and the coupling between states and dynamics. With the floating base orientation estimated separately, a decentralized Moving Horizon Estimation (MHE) method is implemented to fuse the robot dynamics, proprioceptive sensors, exteroceptive sensors, and deterministic contact complementarity constraints in a convex windowed optimization. The proposed method is shown to be capable of providing accurate GRF and state estimation on several legged robots, including the open-source educational planar bipedal robot STRIDE and quadrupedal robot Unitree Go1, with a frequency of 200Hz and a past time window of 0.04s.
Fast Decentralized State Estimation for Legged Robot Locomotion via EKF and MHE
May 31, 2024In this paper, we present a fast and decentralized state estimation framework for the control of legged locomotion. The nonlinear estimation of the floating base states is decentralized to an orientation estimation via Extended Kalman Filter (EKF) and a linear velocity estimation via Moving Horizon Estimation (MHE). The EKF fuses the inertia sensor with vision to estimate the floating base orientation. The MHE uses the estimated orientation with all the sensors within a time window in the past to estimate the linear velocities based on a time-varying linear dynamics formulation of the interested states with state constraints. More importantly, a marginalization method based on the optimization structure of the full information filter (FIF) is proposed to convert the equality-constrained FIF to an equivalent MHE. This decoupling of state estimation promotes the desired balance of computation efficiency, accuracy of estimation, and the inclusion of state constraints. The proposed method is shown to be capable of providing accurate state estimation to several legged robots, including the highly dynamic hopping robot PogoX, the bipedal robot Cassie, and the quadrupedal robot Unitree Go1, with a frequency at 200 Hz and a window interval of 0.1s.
Terrestrial Locomotion of PogoX: From Hardware Design to Energy Shaping and Step-to-step Dynamics Based Control
Sep 26, 2023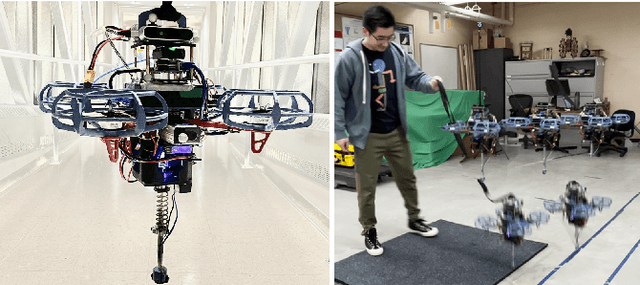
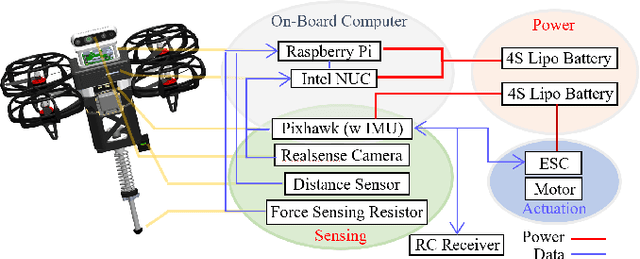
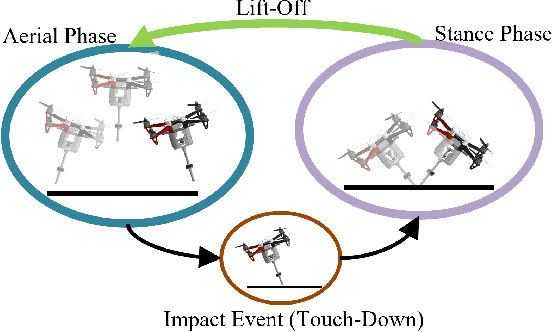
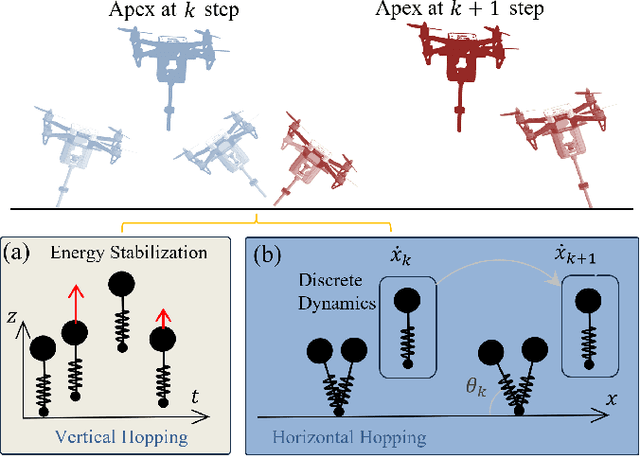
We present a novel controller design on a robotic locomotor that combines an aerial vehicle with a spring-loaded leg. The main motivation is to enable the terrestrial locomotion capability on aerial vehicles so that they can carry heavy loads: heavy enough that flying is no longer possible, e.g., when the thrust-to-weight ratio (TWR) is small. The robot is designed with a pogo-stick leg and a quadrotor, and thus it is named as PogoX. We show that with a simple and lightweight spring-loaded leg, the robot is capable of hopping with TWR $<1$. The control of hopping is realized via two components: a vertical height control via control Lyapunov function-based energy shaping, and a step-to-step (S2S) dynamics based horizontal velocity control that is inspired by the hopping of the Spring-Loaded Inverted Pendulum (SLIP). The controller is successfully realized on the physical robot, showing dynamic terrestrial locomotion of PogoX which can hop at variable heights and different horizontal velocities with robustness to ground height variations and external pushes.