 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImage and Data Mining in Reticular Chemistry Using GPT-4V
Dec 09, 2023



The integration of artificial intelligence into scientific research has reached a new pinnacle with GPT-4V, a large language model featuring enhanced vision capabilities, accessible through ChatGPT or an API. This study demonstrates the remarkable ability of GPT-4V to navigate and obtain complex data for metal-organic frameworks, especially from graphical sources. Our approach involved an automated process of converting 346 scholarly articles into 6240 images, which represents a benchmark dataset in this task, followed by deploying GPT-4V to categorize and analyze these images using natural language prompts. This methodology enabled GPT-4V to accurately identify and interpret key plots integral to MOF characterization, such as nitrogen isotherms, PXRD patterns, and TGA curves, among others, with accuracy and recall above 93%. The model's proficiency in extracting critical information from these plots not only underscores its capability in data mining but also highlights its potential in aiding the creation of comprehensive digital databases for reticular chemistry. In addition, the extracted nitrogen isotherm data from the selected literature allowed for a comparison between theoretical and experimental porosity values for over 200 compounds, highlighting certain discrepancies and underscoring the importance of integrating computational and experimental data. This work highlights the potential of AI in accelerating scientific discovery and innovation, bridging the gap between computational tools and experimental research, and paving the way for more efficient, inclusive, and comprehensive scientific inquiry.
Bioinspired soft robotics: How do we learn from creatures?
Feb 24, 2023Soft robotics has opened a unique path to flexibility and environmental adaptability, learning from nature and reproducing biological behaviors. Nature implies answers for how to apply robots to real life. To find out how we learn from creatures to design and apply soft robots, in this Review, we propose a classification method to summarize soft robots based on different functions of biological systems: self-growing, self-healing, self-responsive, and self-circulatory. The bio-function based classification logic is presented to explain why we learn from creatures. State-of-art technologies, characteristics, pros, cons, challenges, and potential applications of these categories are analyzed to illustrate what we learned from creatures. By intersecting these categories, the existing and potential bio-inspired applications are overviewed and outlooked to finally find the answer, that is, how we learn from creatures.
Copebot: Underwater soft robot with copepod-like locomotion
Feb 16, 2023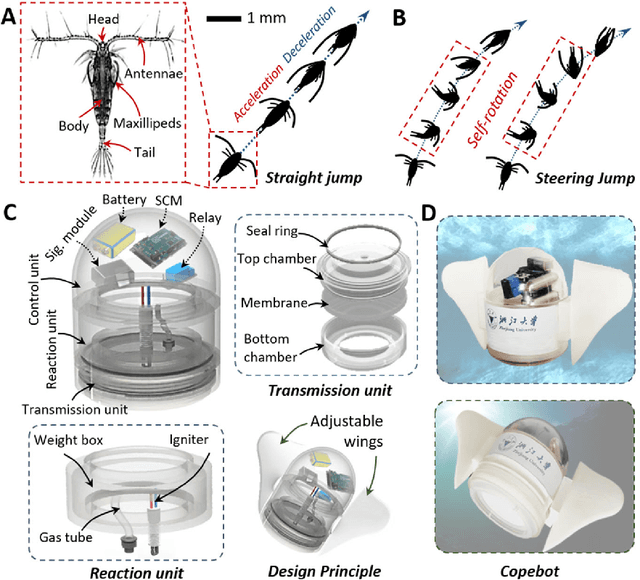
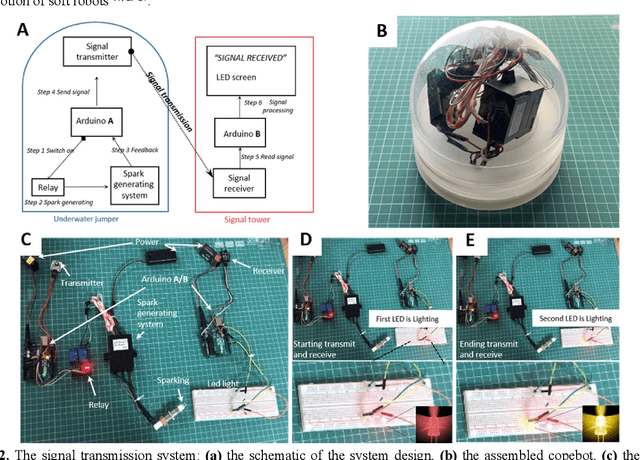
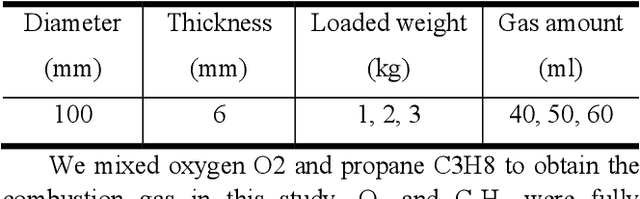
It has been a great challenge to develop robots that are able to perform complex movement patterns with high speed and, simultaneously, high accuracy. Copepods are animals found in freshwater and saltwater habitats that can have extremely fast escape responses when a predator is sensed by performing explosive curved jumps. Here, we present a design and build prototypes of a combustion-driven underwater soft robot, the "copebot", that, like copepods, is able to accurately reach nearby predefined locations in space within a single curved jump. Because of an improved thrust force transmission unit, causing a large initial acceleration peak (850 Bodylength*s-2), the copebot is 8 times faster than previous combustion-driven underwater soft robots, whilst able to perform a complete 360{\deg} rotation during the jump. Thrusts generated by the copebot are tested to quantitatively determine the actuation performance, and parametric studies are conducted to investigate the sensitivities of the input parameters to the kinematic performance of the copebot. We demonstrate the utility of our design by building a prototype that rapidly jumps out of the water, accurately lands on its feet on a small platform, wirelessly transmits data, and jumps back into the water. Our copebot design opens the way toward high-performance biomimetic robots for multifunctional applications.