 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeYOLO series target detection algorithms for underwater environments
Sep 07, 2023You Only Look Once (YOLO) algorithm is a representative target detection algorithm emerging in 2016, which is known for its balance of computing speed and accuracy, and now plays an important role in various fields of human production and life. However, there are still many limitations in the application of YOLO algorithm in underwater environments due to problems such as dim light and turbid water. With limited land area resources, the ocean must have great potential for future human development. In this paper, starting from the actual needs of marine engineering applications, taking underwater structural health monitoring (SHM) and underwater biological detection as examples, we propose improved methods for the application of underwater YOLO algorithms, and point out the problems that still exist.
Bioinspired soft robotics: How do we learn from creatures?
Feb 24, 2023Soft robotics has opened a unique path to flexibility and environmental adaptability, learning from nature and reproducing biological behaviors. Nature implies answers for how to apply robots to real life. To find out how we learn from creatures to design and apply soft robots, in this Review, we propose a classification method to summarize soft robots based on different functions of biological systems: self-growing, self-healing, self-responsive, and self-circulatory. The bio-function based classification logic is presented to explain why we learn from creatures. State-of-art technologies, characteristics, pros, cons, challenges, and potential applications of these categories are analyzed to illustrate what we learned from creatures. By intersecting these categories, the existing and potential bio-inspired applications are overviewed and outlooked to finally find the answer, that is, how we learn from creatures.
Copebot: Underwater soft robot with copepod-like locomotion
Feb 16, 2023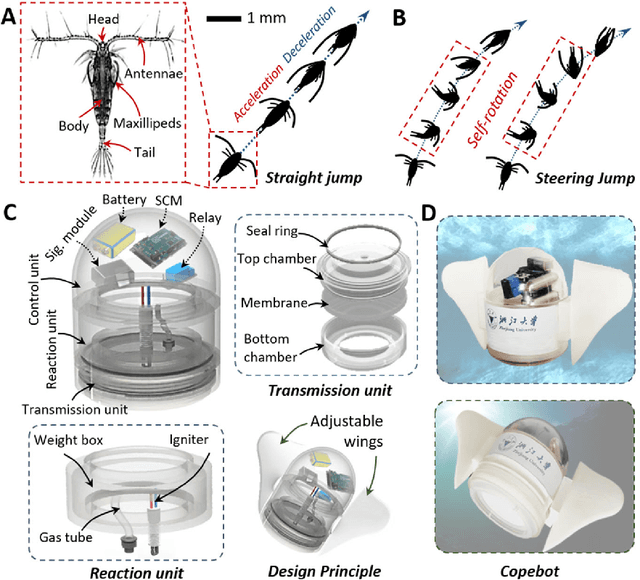
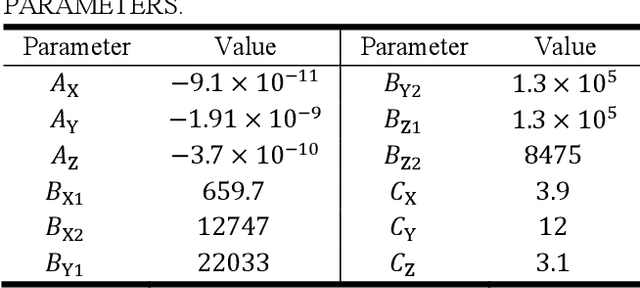
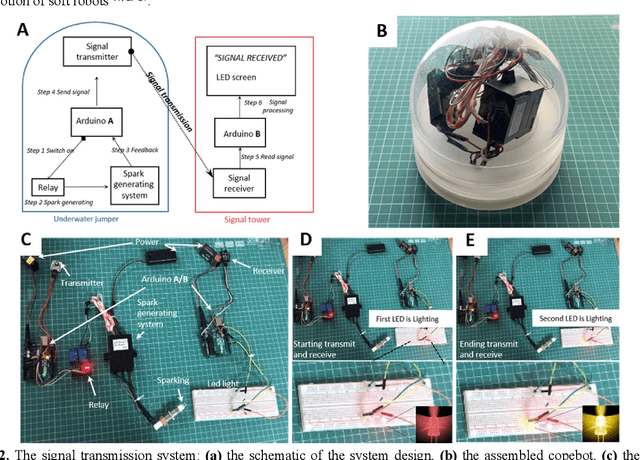
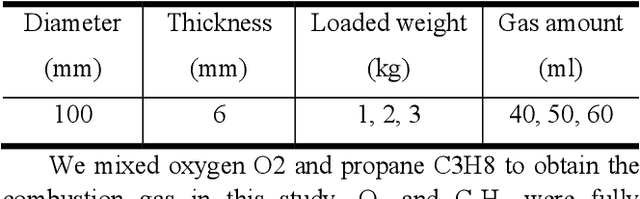
It has been a great challenge to develop robots that are able to perform complex movement patterns with high speed and, simultaneously, high accuracy. Copepods are animals found in freshwater and saltwater habitats that can have extremely fast escape responses when a predator is sensed by performing explosive curved jumps. Here, we present a design and build prototypes of a combustion-driven underwater soft robot, the "copebot", that, like copepods, is able to accurately reach nearby predefined locations in space within a single curved jump. Because of an improved thrust force transmission unit, causing a large initial acceleration peak (850 Bodylength*s-2), the copebot is 8 times faster than previous combustion-driven underwater soft robots, whilst able to perform a complete 360{\deg} rotation during the jump. Thrusts generated by the copebot are tested to quantitatively determine the actuation performance, and parametric studies are conducted to investigate the sensitivities of the input parameters to the kinematic performance of the copebot. We demonstrate the utility of our design by building a prototype that rapidly jumps out of the water, accurately lands on its feet on a small platform, wirelessly transmits data, and jumps back into the water. Our copebot design opens the way toward high-performance biomimetic robots for multifunctional applications.