 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHybrIK-X: Hybrid Analytical-Neural Inverse Kinematics for Whole-body Mesh Recovery
Apr 12, 2023Recovering whole-body mesh by inferring the abstract pose and shape parameters from visual content can obtain 3D bodies with realistic structures. However, the inferring process is highly non-linear and suffers from image-mesh misalignment, resulting in inaccurate reconstruction. In contrast, 3D keypoint estimation methods utilize the volumetric representation to achieve pixel-level accuracy but may predict unrealistic body structures. To address these issues, this paper presents a novel hybrid inverse kinematics solution, HybrIK, that integrates the merits of 3D keypoint estimation and body mesh recovery in a unified framework. HybrIK directly transforms accurate 3D joints to body-part rotations via twist-and-swing decomposition. The swing rotations are analytically solved with 3D joints, while the twist rotations are derived from visual cues through neural networks. To capture comprehensive whole-body details, we further develop a holistic framework, HybrIK-X, which enhances HybrIK with articulated hands and an expressive face. HybrIK-X is fast and accurate by solving the whole-body pose with a one-stage model. Experiments demonstrate that HybrIK and HybrIK-X preserve both the accuracy of 3D joints and the realistic structure of the parametric human model, leading to pixel-aligned whole-body mesh recovery. The proposed method significantly surpasses the state-of-the-art methods on various benchmarks for body-only, hand-only, and whole-body scenarios. Code and results can be found at https://jeffli.site/HybrIK-X/
HybrIK: A Hybrid Analytical-Neural Inverse Kinematics Solution for 3D Human Pose and Shape Estimation
Nov 30, 2020
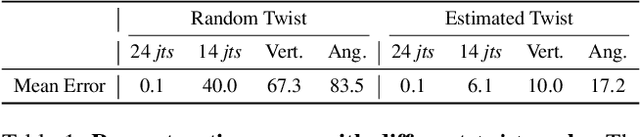
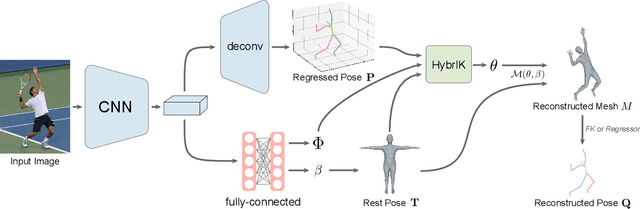

Model-based 3D pose and shape estimation methods reconstruct a full 3D mesh for the human body by estimating several parameters. However, learning the abstract parameters is a highly non-linear process and suffers from image-model misalignment, leading to mediocre model performance. In contrast, 3D keypoint estimation methods combine deep CNN network with the volumetric representation to achieve pixel-level localization accuracy but may predict unrealistic body structure. In this paper, we address the above issues by bridging the gap between body mesh estimation and 3D keypoint estimation. We propose a novel hybrid inverse kinematics solution (HybrIK). HybrIK directly transforms accurate 3D joints to relative body-part rotations for 3D body mesh reconstruction, via the twist-and-swing decomposition. The swing rotation is analytically solved with 3D joints, and the twist rotation is derived from the visual cues through the neural network. We show that HybrIK preserves both the accuracy of 3D pose and the realistic body structure of the parametric human model, leading to a pixel-aligned 3D body mesh and a more accurate 3D pose than the pure 3D keypoint estimation methods. Without bells and whistles, the proposed method surpasses the state-of-the-art methods by a large margin on various 3D human pose and shape benchmarks. As an illustrative example, HybrIK outperforms all the previous methods by 13.2 mm MPJPE and 21.9 mm PVE on 3DPW dataset. Our code is available at https://github.com/Jeff-sjtu/HybrIK.