 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeROMA: Cross-Domain Region Similarity Matching for Unpaired Nighttime Infrared to Daytime Visible Video Translation
Apr 26, 2022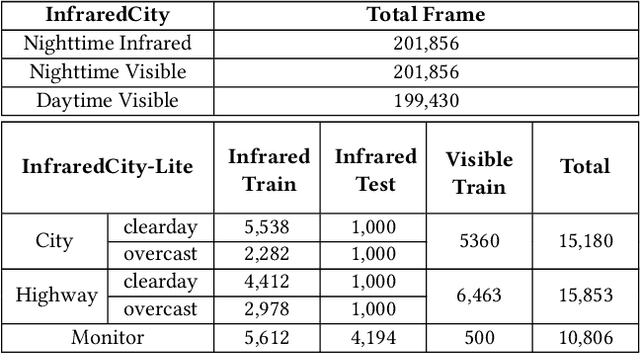
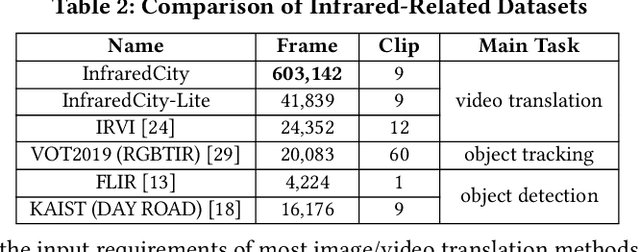
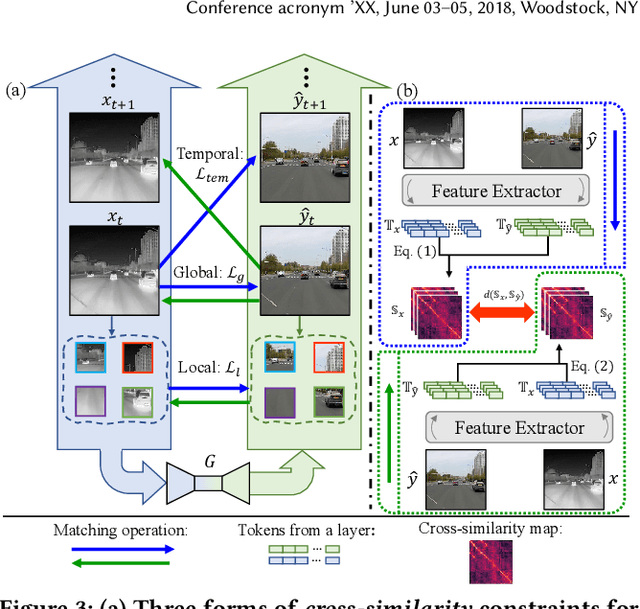
Infrared cameras are often utilized to enhance the night vision since the visible light cameras exhibit inferior efficacy without sufficient illumination. However, infrared data possesses inadequate color contrast and representation ability attributed to its intrinsic heat-related imaging principle. This makes it arduous to capture and analyze information for human beings, meanwhile hindering its application. Although, the domain gaps between unpaired nighttime infrared and daytime visible videos are even huger than paired ones that captured at the same time, establishing an effective translation mapping will greatly contribute to various fields. In this case, the structural knowledge within nighttime infrared videos and semantic information contained in the translated daytime visible pairs could be utilized simultaneously. To this end, we propose a tailored framework ROMA that couples with our introduced cRoss-domain regiOn siMilarity mAtching technique for bridging the huge gaps. To be specific, ROMA could efficiently translate the unpaired nighttime infrared videos into fine-grained daytime visible ones, meanwhile maintain the spatiotemporal consistency via matching the cross-domain region similarity. Furthermore, we design a multiscale region-wise discriminator to distinguish the details from synthesized visible results and real references. Extensive experiments and evaluations for specific applications indicate ROMA outperforms the state-of-the-art methods. Moreover, we provide a new and challenging dataset encouraging further research for unpaired nighttime infrared and daytime visible video translation, named InfraredCity. In particular, it consists of 9 long video clips including City, Highway and Monitor scenarios. All clips could be split into 603,142 frames in total, which are 20 times larger than the recently released daytime infrared-to-visible dataset IRVI.
I2V-GAN: Unpaired Infrared-to-Visible Video Translation
Aug 04, 2021
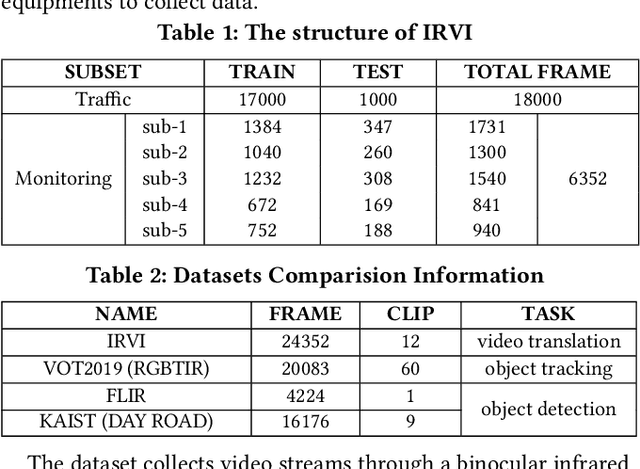
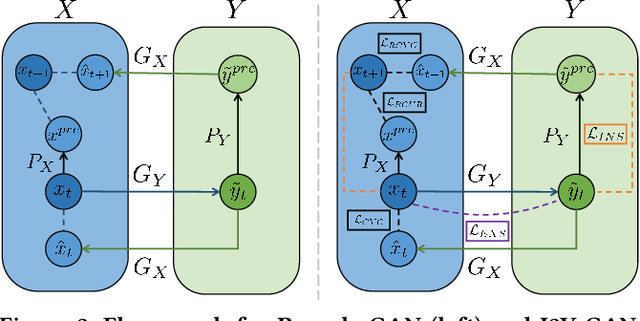
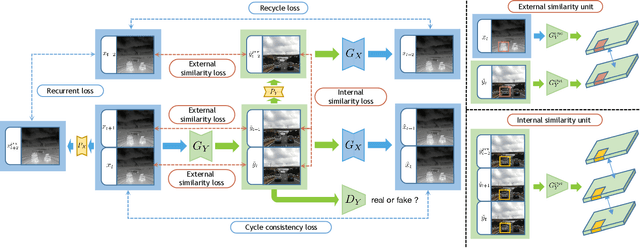
Human vision is often adversely affected by complex environmental factors, especially in night vision scenarios. Thus, infrared cameras are often leveraged to help enhance the visual effects via detecting infrared radiation in the surrounding environment, but the infrared videos are undesirable due to the lack of detailed semantic information. In such a case, an effective video-to-video translation method from the infrared domain to the visible light counterpart is strongly needed by overcoming the intrinsic huge gap between infrared and visible fields. To address this challenging problem, we propose an infrared-to-visible (I2V) video translation method I2V-GAN to generate fine-grained and spatial-temporal consistent visible light videos by given unpaired infrared videos. Technically, our model capitalizes on three types of constraints: 1)adversarial constraint to generate synthetic frames that are similar to the real ones, 2)cyclic consistency with the introduced perceptual loss for effective content conversion as well as style preservation, and 3)similarity constraints across and within domains to enhance the content and motion consistency in both spatial and temporal spaces at a fine-grained level. Furthermore, the current public available infrared and visible light datasets are mainly used for object detection or tracking, and some are composed of discontinuous images which are not suitable for video tasks. Thus, we provide a new dataset for I2V video translation, which is named IRVI. Specifically, it has 12 consecutive video clips of vehicle and monitoring scenes, and both infrared and visible light videos could be apart into 24352 frames. Comprehensive experiments validate that I2V-GAN is superior to the compared SOTA methods in the translation of I2V videos with higher fluency and finer semantic details. The code and IRVI dataset are available at https://github.com/BIT-DA/I2V-GAN.