 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCVR-LSE: Compact Vectorization Representation of Local Static Environments for Unmanned Ground Vehicles
Jun 14, 2022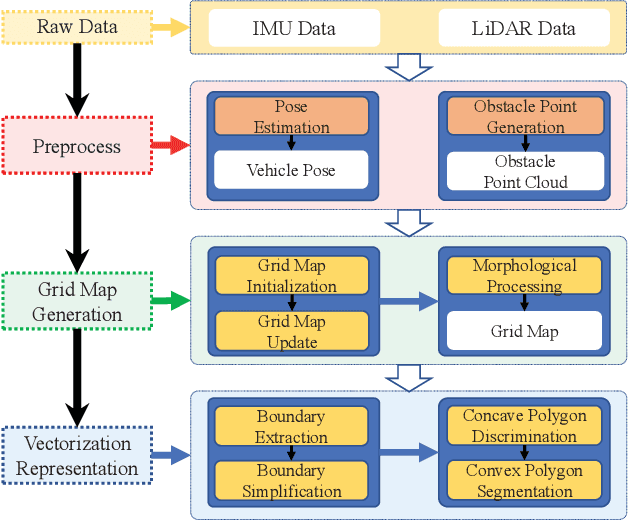
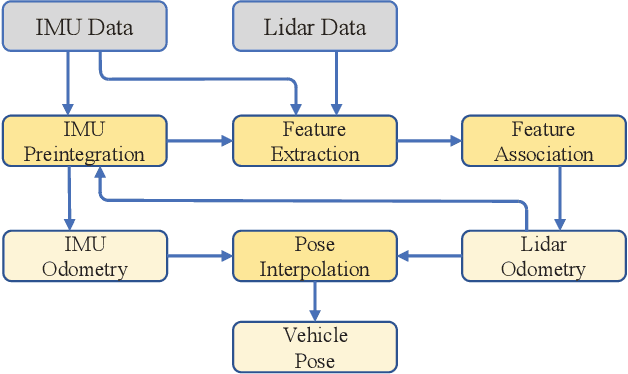
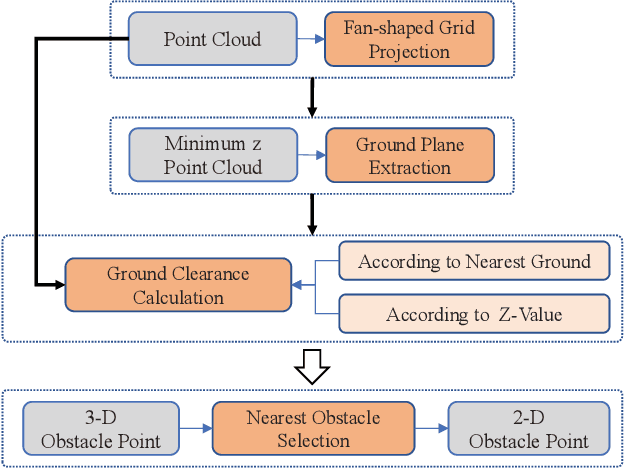
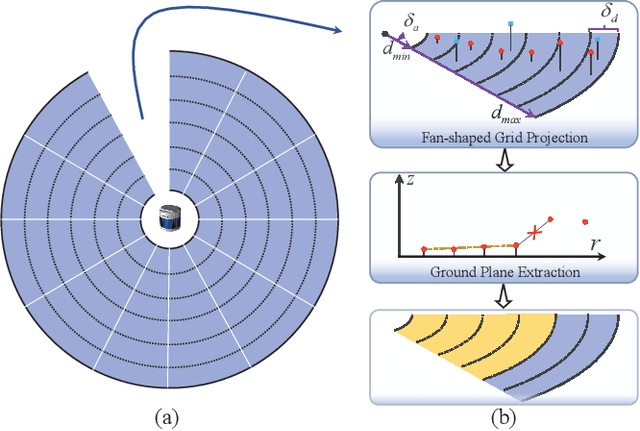
According to the requirement of general static obstacle detection, this paper proposes a compact vectorization representation approach of local static environments for unmanned ground vehicles. At first, by fusing the data of LiDAR and IMU, high-frequency pose information is obtained. Then, through the two-dimensional (2D) obstacle points generation, the process of grid map maintenance with a fixed size is proposed. Finally, the local static environment is described via multiple convex polygons, which is realized throungh the double threshold-based boundary simplification and the convex polygon segmentation. Our proposed approach has been applied in a practical driverless project in the park, and the qualitative experimental results on typical scenes verify the effectiveness and robustness. In addition, the quantitative evaluation shows the superior performance on making use of fewer number of points information (decreased by about 60%) to represent the local static environment compared with the traditional grid map-based methods. Furthermore, the performance of running time (15ms) shows that the proposed approach can be used for real-time local static environment perception. The corresponding code can be accessed at https://github.com/ghm0819/cvr_lse.