 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlyAware: Inertia-Aware Aerial Manipulation via Vision-Based Estimation and Post-Grasp Adaptation
Jan 30, 2026Aerial manipulators (AMs) are gaining increasing attention in automated transportation and emergency services due to their superior dexterity compared to conventional multirotor drones. However, their practical deployment is challenged by the complexity of time-varying inertial parameters, which are highly sensitive to payload variations and manipulator configurations. Inspired by human strategies for interacting with unknown objects, this letter presents a novel onboard framework for robust aerial manipulation. The proposed system integrates a vision-based pre-grasp inertia estimation module with a post-grasp adaptation mechanism, enabling real-time estimation and adaptation of inertial dynamics. For control, we develop an inertia-aware adaptive control strategy based on gain scheduling, and assess its robustness via frequency-domain system identification. Our study provides new insights into post-grasp control for AMs, and real-world experiments validate the effectiveness and feasibility of the proposed framework.
InScope: A New Real-world 3D Infrastructure-side Collaborative Perception Dataset for Open Traffic Scenarios
Jul 31, 2024



Perception systems of autonomous vehicles are susceptible to occlusion, especially when examined from a vehicle-centric perspective. Such occlusion can lead to overlooked object detections, e.g., larger vehicles such as trucks or buses may create blind spots where cyclists or pedestrians could be obscured, accentuating the safety concerns associated with such perception system limitations. To mitigate these challenges, the vehicle-to-everything (V2X) paradigm suggests employing an infrastructure-side perception system (IPS) to complement autonomous vehicles with a broader perceptual scope. Nevertheless, the scarcity of real-world 3D infrastructure-side datasets constrains the advancement of V2X technologies. To bridge these gaps, this paper introduces a new 3D infrastructure-side collaborative perception dataset, abbreviated as inscope. Notably, InScope is the first dataset dedicated to addressing occlusion challenges by strategically deploying multiple-position Light Detection and Ranging (LiDAR) systems on the infrastructure side. Specifically, InScope encapsulates a 20-day capture duration with 303 tracking trajectories and 187,787 3D bounding boxes annotated by experts. Through analysis of benchmarks, four different benchmarks are presented for open traffic scenarios, including collaborative 3D object detection, multisource data fusion, data domain transfer, and 3D multiobject tracking tasks. Additionally, a new metric is designed to quantify the impact of occlusion, facilitating the evaluation of detection degradation ratios among various algorithms. The Experimental findings showcase the enhanced performance of leveraging InScope to assist in detecting and tracking 3D multiobjects in real-world scenarios, particularly in tracking obscured, small, and distant objects. The dataset and benchmarks are available at https://github.com/xf-zh/InScope.
Local communities obstruct global consensus: Naming game on multi-local-world networks
Jan 03, 2018

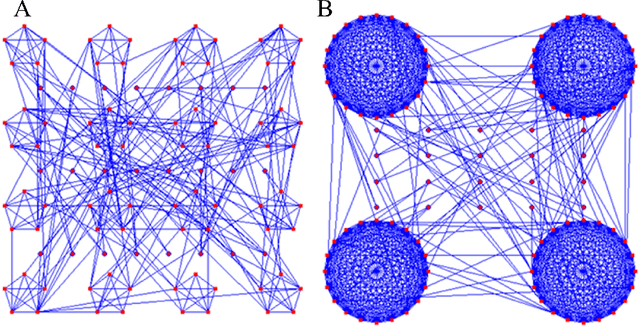
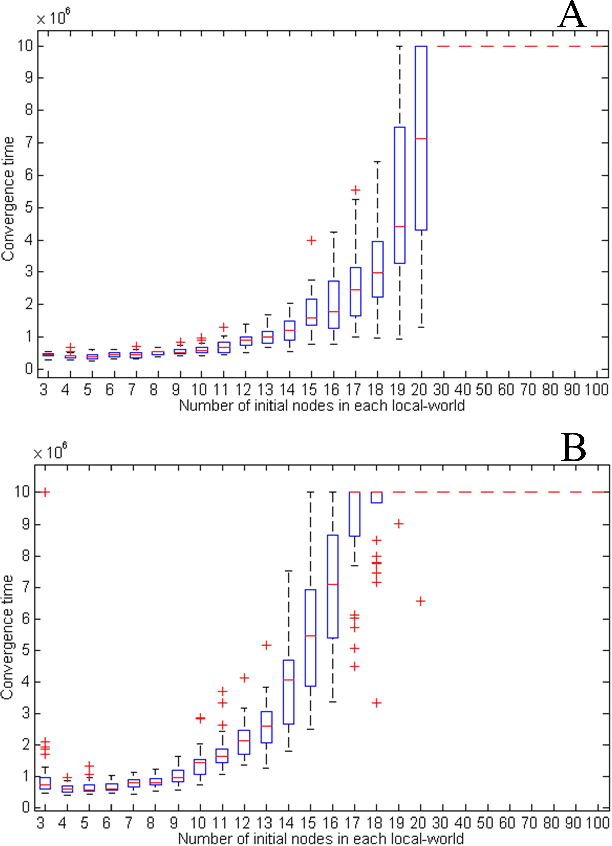
Community structure is essential for social communications, where individuals belonging to the same community are much more actively interacting and communicating with each other than those in different communities within the human society. Naming game, on the other hand, is a social communication model that simulates the process of learning a name of an object within a community of humans, where the individuals can generally reach global consensus asymptotically through iterative pair-wise conversations. The underlying network indicates the relationships among the individuals. In this paper, three typical topologies, namely random-graph, small-world and scale-free networks, are employed, which are embedded with the multi-local-world community structure, to study the naming game. Simulations show that 1) the convergence process to global consensus is getting slower as the community structure becomes more prominent, and eventually might fail; 2) if the inter-community connections are sufficiently dense, neither the number nor the size of the communities affects the convergence process; and 3) for different topologies with the same average node-degree, local clustering of individuals obstruct or prohibit global consensus to take place. The results reveal the role of local communities in a global naming game in social network studies.
* 31 pages, 17 figures