 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmbodiedMidtrain: Bridging the Gap between Vision-Language Models and Vision-Language-Action Models via Mid-training
Apr 21, 2026Vision-Language-Action Models (VLAs) inherit their visual and linguistic capabilities from Vision-Language Models (VLMs), yet most VLAs are built from off-the-shelf VLMs that are not adapted to the embodied domain, limiting their downstream performance. In this work, we propose EmbodiedMidtrain to bridge the gap between VLMs and VLAs. We first characterize the data distribution gap between them, showing that VLA data occupy compact regions that are largely separated from the broader VLM distribution, while the degree of alignment varies substantially both across and within VLM data sources. Then, we build a mid-training data engine that leverages a lightweight learnable proximity estimator to select the most VLA-aligned candidates from a large VLM pool, and mid-trains the VLM on this curated mixture before downstream VLA fine-tuning. Experiments on three robot manipulation benchmarks show that mid-training consistently improves performance across different VLM backbones, achieving results competitive with expert VLAs and off-the-shelf VLMs trained with larger model scale and training budgets. Further analysis reveals that mid-training provides a stronger initialization for VLA fine-tuning, with gains emerging from the earliest steps and widening throughout training. Moreover, the data engine captures both dataset-level and sample-level alignment signals, favoring spatial reasoning over text-centric tasks while preserving the diversity of the VLM data. We will release all code, data and models for future research.
Modeling Distinct Human Interaction in Web Agents
Feb 19, 2026Despite rapid progress in autonomous web agents, human involvement remains essential for shaping preferences and correcting agent behavior as tasks unfold. However, current agentic systems lack a principled understanding of when and why humans intervene, often proceeding autonomously past critical decision points or requesting unnecessary confirmation. In this work, we introduce the task of modeling human intervention to support collaborative web task execution. We collect CowCorpus, a dataset of 400 real-user web navigation trajectories containing over 4,200 interleaved human and agent actions. We identify four distinct patterns of user interaction with agents -- hands-off supervision, hands-on oversight, collaborative task-solving, and full user takeover. Leveraging these insights, we train language models (LMs) to anticipate when users are likely to intervene based on their interaction styles, yielding a 61.4-63.4% improvement in intervention prediction accuracy over base LMs. Finally, we deploy these intervention-aware models in live web navigation agents and evaluate them in a user study, finding a 26.5% increase in user-rated agent usefulness. Together, our results show structured modeling of human intervention leads to more adaptive, collaborative agents.
DynaMem: Online Dynamic Spatio-Semantic Memory for Open World Mobile Manipulation
Nov 07, 2024
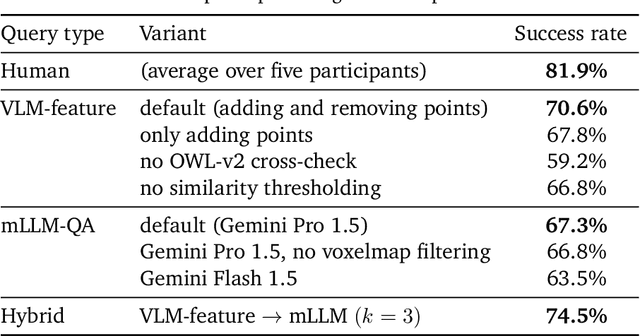
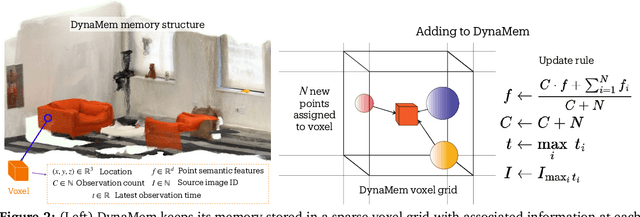
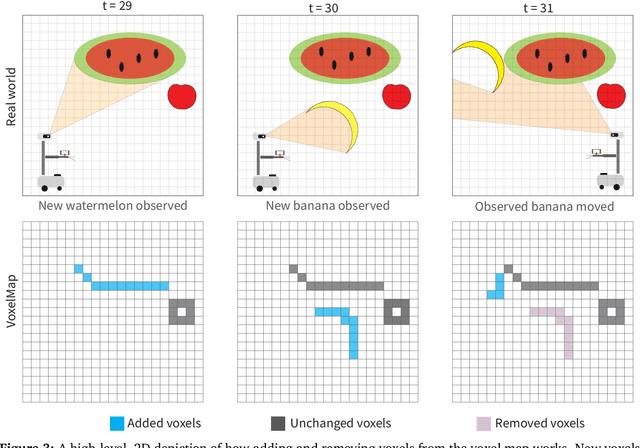
Significant progress has been made in open-vocabulary mobile manipulation, where the goal is for a robot to perform tasks in any environment given a natural language description. However, most current systems assume a static environment, which limits the system's applicability in real-world scenarios where environments frequently change due to human intervention or the robot's own actions. In this work, we present DynaMem, a new approach to open-world mobile manipulation that uses a dynamic spatio-semantic memory to represent a robot's environment. DynaMem constructs a 3D data structure to maintain a dynamic memory of point clouds, and answers open-vocabulary object localization queries using multimodal LLMs or open-vocabulary features generated by state-of-the-art vision-language models. Powered by DynaMem, our robots can explore novel environments, search for objects not found in memory, and continuously update the memory as objects move, appear, or disappear in the scene. We run extensive experiments on the Stretch SE3 robots in three real and nine offline scenes, and achieve an average pick-and-drop success rate of 70% on non-stationary objects, which is more than a 2x improvement over state-of-the-art static systems. Our code as well as our experiment and deployment videos are open sourced and can be found on our project website: https://dynamem.github.io/
ContextWIN: Whittle Index Based Mixture-of-Experts Neural Model For Restless Bandits Via Deep RL
Oct 13, 2024
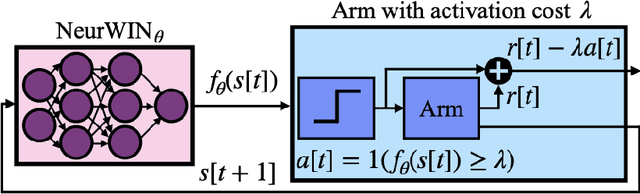
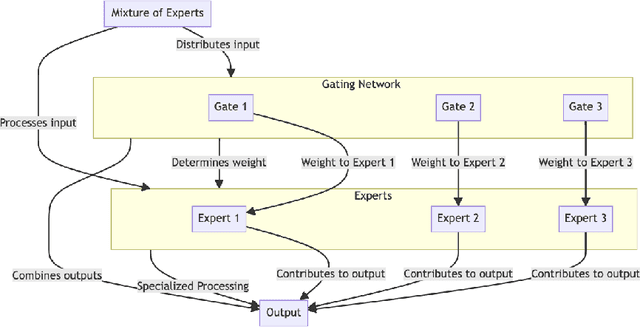
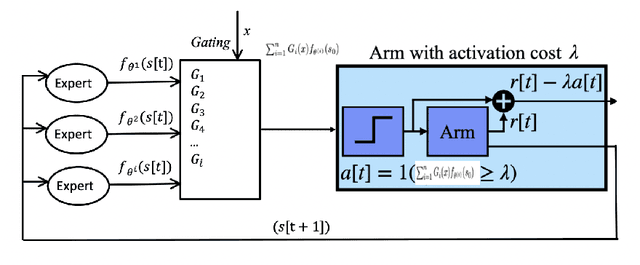
This study introduces ContextWIN, a novel architecture that extends the Neural Whittle Index Network (NeurWIN) model to address Restless Multi-Armed Bandit (RMAB) problems with a context-aware approach. By integrating a mixture of experts within a reinforcement learning framework, ContextWIN adeptly utilizes contextual information to inform decision-making in dynamic environments, particularly in recommendation systems. A key innovation is the model's ability to assign context-specific weights to a subset of NeurWIN networks, thus enhancing the efficiency and accuracy of the Whittle index computation for each arm. The paper presents a thorough exploration of ContextWIN, from its conceptual foundation to its implementation and potential applications. We delve into the complexities of RMABs and the significance of incorporating context, highlighting how ContextWIN effectively harnesses these elements. The convergence of both the NeurWIN and ContextWIN models is rigorously proven, ensuring theoretical robustness. This work lays the groundwork for future advancements in applying contextual information to complex decision-making scenarios, recognizing the need for comprehensive dataset exploration and environment development for full potential realization.