 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProDMPs: A Unified Perspective on Dynamic and Probabilistic Movement Primitives
Oct 04, 2022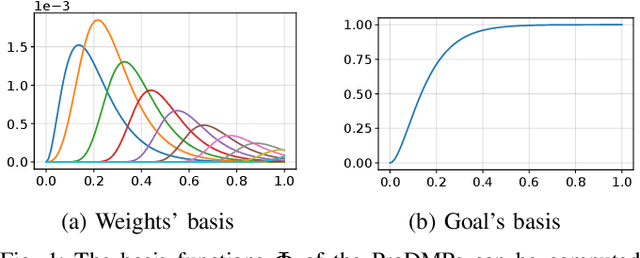
Movement Primitives (MPs) are a well-known concept to represent and generate modular trajectories. MPs can be broadly categorized into two types: (a) dynamics-based approaches that generate smooth trajectories from any initial state, e. g., Dynamic Movement Primitives (DMPs), and (b) probabilistic approaches that capture higher-order statistics of the motion, e. g., Probabilistic Movement Primitives (ProMPs). To date, however, there is no method that unifies both, i. e. that can generate smooth trajectories from an arbitrary initial state while capturing higher-order statistics. In this paper, we introduce a unified perspective of both approaches by solving the ODE underlying the DMPs. We convert expensive online numerical integration of DMPs into basis functions that can be computed offline. These basis functions can be used to represent trajectories or trajectory distributions similar to ProMPs while maintaining all the properties of dynamical systems. Since we inherit the properties of both methodologies, we call our proposed model Probabilistic Dynamic Movement Primitives (ProDMPs). Additionally, we embed ProDMPs in deep neural network architecture and propose a new cost function for efficient end-to-end learning of higher-order trajectory statistics. To this end, we leverage Bayesian Aggregation for non-linear iterative conditioning on sensory inputs. Our proposed model achieves smooth trajectory generation, goal-attractor convergence, correlation analysis, non-linear conditioning, and online re-planing in one framework.