 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Causal-Guided Multimodal Large Language Model for Generalized Power System Time-Series Data Analytics
Nov 11, 2025Power system time series analytics is critical in understanding the system operation conditions and predicting the future trends. Despite the wide adoption of Artificial Intelligence (AI) tools, many AI-based time series analytical models suffer from task-specificity (i.e. one model for one task) and structural rigidity (i.e. the input-output format is fixed), leading to limited model performances and resource wastes. In this paper, we propose a Causal-Guided Multimodal Large Language Model (CM-LLM) that can solve heterogeneous power system time-series analysis tasks. First, we introduce a physics-statistics combined causal discovery mechanism to capture the causal relationship, which is represented by graph, among power system variables. Second, we propose a multimodal data preprocessing framework that can encode and fuse text, graph and time series to enhance the model performance. Last, we formulate a generic "mask-and-reconstruct" paradigm and design a dynamic input-output padding mechanism to enable CM-LLM adaptive to heterogeneous time-series analysis tasks with varying sample lengths. Simulation results based on open-source LLM Qwen and real-world dataset demonstrate that, after simple fine-tuning, the proposed CM-LLM can achieve satisfying accuracy and efficiency on three heterogeneous time-series analytics tasks: missing data imputation, forecasting and super resolution.
Driving-RAG: Driving Scenarios Embedding, Search, and RAG Applications
Apr 06, 2025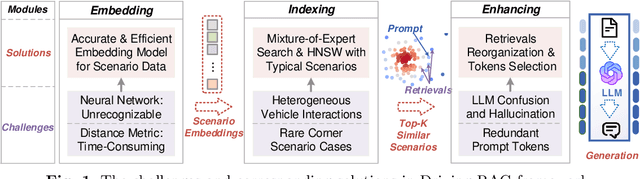
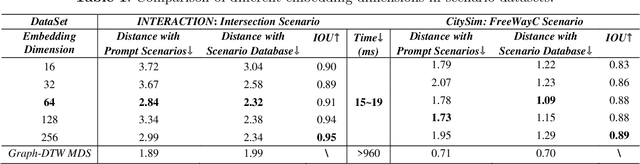
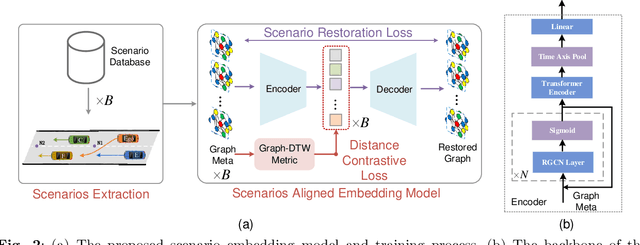
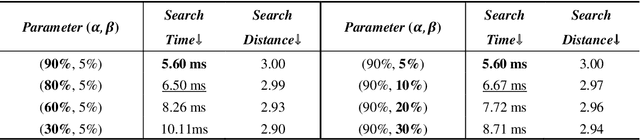
Driving scenario data play an increasingly vital role in the development of intelligent vehicles and autonomous driving. Accurate and efficient scenario data search is critical for both online vehicle decision-making and planning, and offline scenario generation and simulations, as it allows for leveraging the scenario experiences to improve the overall performance. Especially with the application of large language models (LLMs) and Retrieval-Augmented-Generation (RAG) systems in autonomous driving, urgent requirements are put forward. In this paper, we introduce the Driving-RAG framework to address the challenges of efficient scenario data embedding, search, and applications for RAG systems. Our embedding model aligns fundamental scenario information and scenario distance metrics in the vector space. The typical scenario sampling method combined with hierarchical navigable small world can perform efficient scenario vector search to achieve high efficiency without sacrificing accuracy. In addition, the reorganization mechanism by graph knowledge enhances the relevance to the prompt scenarios and augment LLM generation. We demonstrate the effectiveness of the proposed framework on typical trajectory planning task for complex interactive scenarios such as ramps and intersections, showcasing its advantages for RAG applications.
A White-Box Deep-Learning Method for Electrical Energy System Modeling Based on Kolmogorov-Arnold Network
Sep 12, 2024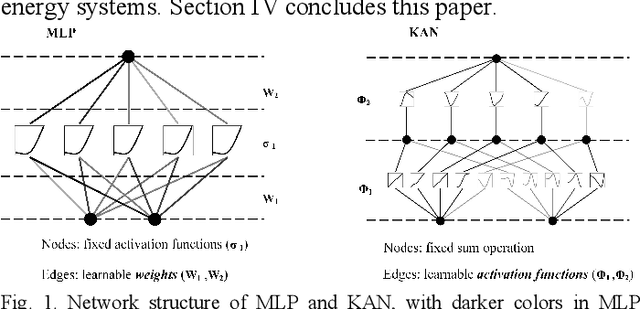
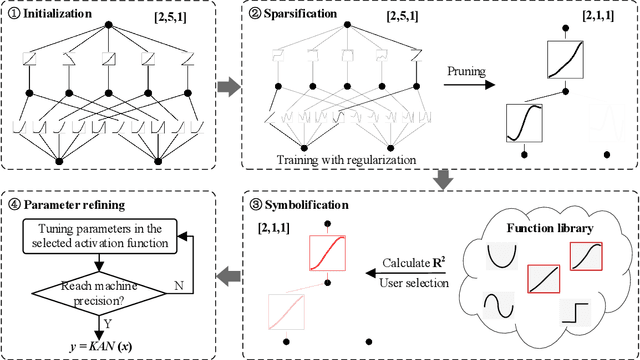
Deep learning methods have been widely used as an end-to-end modeling strategy of electrical energy systems because of their conveniency and powerful pattern recognition capability. However, due to the "black-box" nature, deep learning methods have long been blamed for their poor interpretability when modeling a physical system. In this paper, we introduce a novel neural network structure, Kolmogorov-Arnold Network (KAN), to achieve "white-box" modeling for electrical energy systems to enhance the interpretability. The most distinct feature of KAN lies in the learnable activation function together with the sparse training and symbolification process. Consequently, KAN can express the physical process with concise and explicit mathematical formulas while remaining the nonlinear-fitting capability of deep neural networks. Simulation results based on three electrical energy systems demonstrate the effectiveness of KAN in the aspects of interpretability, accuracy, robustness and generalization ability.
A Neural-Network-Embedded Equivalent Circuit Model for Lithium-ion Battery State Estimation
Jul 24, 2024Equivalent Circuit Model(ECM)has been widelyused in battery modeling and state estimation because of itssimplicity, stability and interpretability.However, ECM maygenerate large estimation errors in extreme working conditionssuch as freezing environmenttemperature andcomplexcharging/discharging behaviors,in whichscenariostheelectrochemical characteristics of the battery become extremelycomplex and nonlinear.In this paper,we propose a hybridbattery model by embeddingneural networks as 'virtualelectronic components' into the classical ECM to enhance themodel nonlinear-fitting ability and adaptability. First, thestructure of the proposed hybrid model is introduced, where theembedded neural networks are targeted to fit the residuals of theclassical ECM,Second, an iterative offline training strategy isdesigned to train the hybrid model by merging the battery statespace equation into the neural network loss function. Last, thebattery online state of charge (SOC)estimation is achieved basedon the proposed hybrid model to demonstrate its applicationvalue,Simulation results based on a real-world battery datasetshow that the proposed hybrid model can achieve 29%-64%error reduction for $OC estimation under different operatingconditions at varying environment temperatures.