 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn LLM-Enabled Frequency-Aware Flow Diffusion Model for Natural-Language-Guided Power System Scenario Generation
Feb 23, 2026Diverse and controllable scenario generation (e.g., wind, solar, load, etc.) is critical for robust power system planning and operation. As AI-based scenario generation methods are becoming the mainstream, existing methods (e.g., Conditional Generative Adversarial Nets) mainly rely on a fixed-length numerical conditioning vector to control the generation results, facing challenges in user conveniency and generation flexibility. In this paper, a natural-language-guided scenario generation framework, named LLM-enabled Frequency-aware Flow Diffusion (LFFD), is proposed to enable users to generate desired scenarios using plain human language. First, a pretrained LLM module is introduced to convert generation requests described by unstructured natural languages into ordered semantic space. Second, instead of using standard diffusion models, a flow diffusion model employing a rectified flow matching objective is introduced to achieve efficient and high-quality scenario generation, taking the LLM output as the model input. During the model training process, a frequency-aware multi-objective optimization algorithm is introduced to mitigate the frequency-bias issue. Meanwhile, a dual-agent framework is designed to create text-scenario training sample pairs as well as to standardize semantic evaluation. Experiments based on large-scale photovoltaic and load datasets demonstrate the effectiveness of the proposed method.
A Causal-Guided Multimodal Large Language Model for Generalized Power System Time-Series Data Analytics
Nov 11, 2025Power system time series analytics is critical in understanding the system operation conditions and predicting the future trends. Despite the wide adoption of Artificial Intelligence (AI) tools, many AI-based time series analytical models suffer from task-specificity (i.e. one model for one task) and structural rigidity (i.e. the input-output format is fixed), leading to limited model performances and resource wastes. In this paper, we propose a Causal-Guided Multimodal Large Language Model (CM-LLM) that can solve heterogeneous power system time-series analysis tasks. First, we introduce a physics-statistics combined causal discovery mechanism to capture the causal relationship, which is represented by graph, among power system variables. Second, we propose a multimodal data preprocessing framework that can encode and fuse text, graph and time series to enhance the model performance. Last, we formulate a generic "mask-and-reconstruct" paradigm and design a dynamic input-output padding mechanism to enable CM-LLM adaptive to heterogeneous time-series analysis tasks with varying sample lengths. Simulation results based on open-source LLM Qwen and real-world dataset demonstrate that, after simple fine-tuning, the proposed CM-LLM can achieve satisfying accuracy and efficiency on three heterogeneous time-series analytics tasks: missing data imputation, forecasting and super resolution.
A White-Box Deep-Learning Method for Electrical Energy System Modeling Based on Kolmogorov-Arnold Network
Sep 12, 2024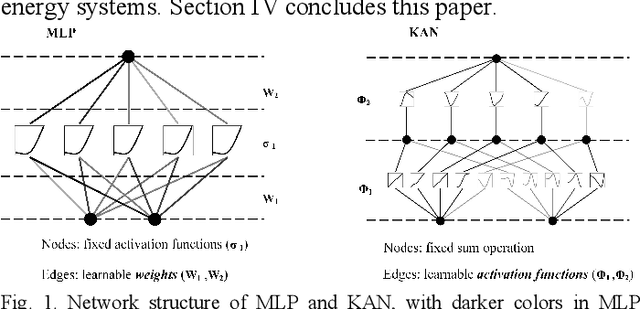
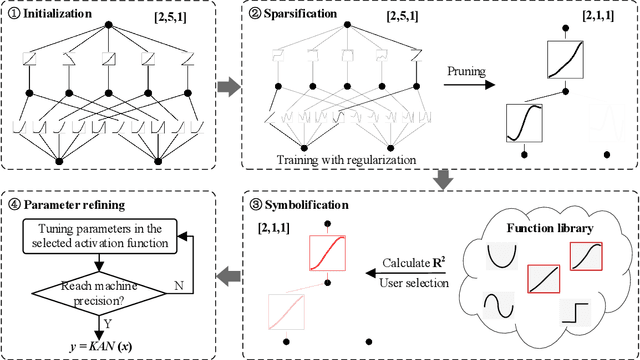
Deep learning methods have been widely used as an end-to-end modeling strategy of electrical energy systems because of their conveniency and powerful pattern recognition capability. However, due to the "black-box" nature, deep learning methods have long been blamed for their poor interpretability when modeling a physical system. In this paper, we introduce a novel neural network structure, Kolmogorov-Arnold Network (KAN), to achieve "white-box" modeling for electrical energy systems to enhance the interpretability. The most distinct feature of KAN lies in the learnable activation function together with the sparse training and symbolification process. Consequently, KAN can express the physical process with concise and explicit mathematical formulas while remaining the nonlinear-fitting capability of deep neural networks. Simulation results based on three electrical energy systems demonstrate the effectiveness of KAN in the aspects of interpretability, accuracy, robustness and generalization ability.
A Neural-Network-Embedded Equivalent Circuit Model for Lithium-ion Battery State Estimation
Jul 24, 2024Equivalent Circuit Model(ECM)has been widelyused in battery modeling and state estimation because of itssimplicity, stability and interpretability.However, ECM maygenerate large estimation errors in extreme working conditionssuch as freezing environmenttemperature andcomplexcharging/discharging behaviors,in whichscenariostheelectrochemical characteristics of the battery become extremelycomplex and nonlinear.In this paper,we propose a hybridbattery model by embeddingneural networks as 'virtualelectronic components' into the classical ECM to enhance themodel nonlinear-fitting ability and adaptability. First, thestructure of the proposed hybrid model is introduced, where theembedded neural networks are targeted to fit the residuals of theclassical ECM,Second, an iterative offline training strategy isdesigned to train the hybrid model by merging the battery statespace equation into the neural network loss function. Last, thebattery online state of charge (SOC)estimation is achieved basedon the proposed hybrid model to demonstrate its applicationvalue,Simulation results based on a real-world battery datasetshow that the proposed hybrid model can achieve 29%-64%error reduction for $OC estimation under different operatingconditions at varying environment temperatures.
Unsupervised and Interpretable Synthesizing for Electrical Time Series Based on Information Maximizing Generative Adversarial Nets
Jul 18, 2024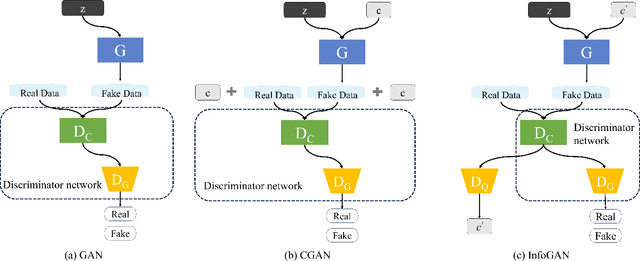
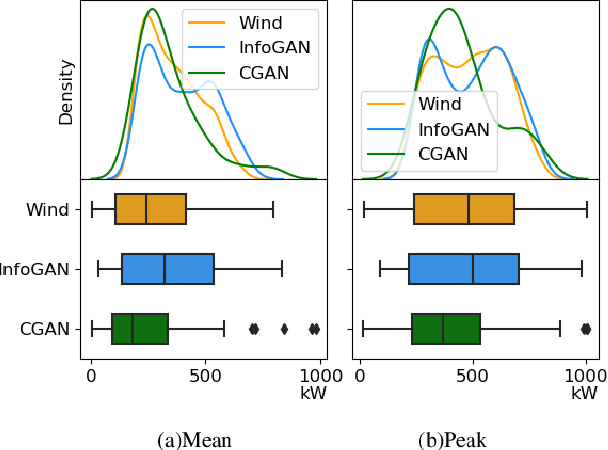
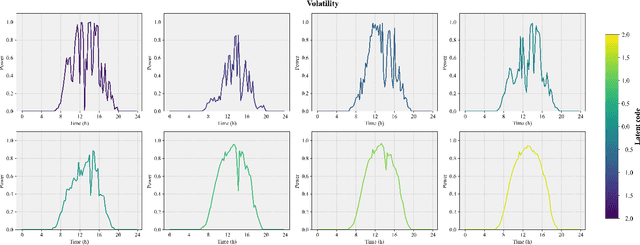
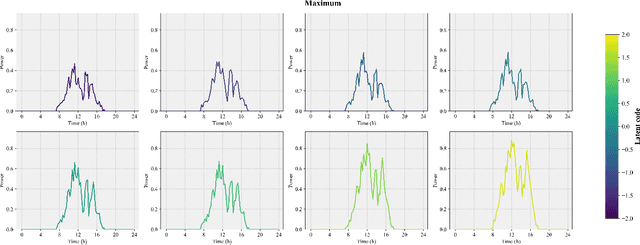
Generating synthetic data has become a popular alternative solution to deal with the difficulties in accessing and sharing field measurement data in power systems. However, to make the generation results controllable, existing methods (e.g. Conditional Generative Adversarial Nets, cGAN) require labeled dataset to train the model, which is demanding in practice because many field measurement data lacks descriptive labels. In this paper, we introduce the Information Maximizing Generative Adversarial Nets (infoGAN) to achieve interpretable feature extraction and controllable synthetic data generation based on the unlabeled electrical time series dataset. Features with clear physical meanings can be automatically extracted by maximizing the mutual information between the input latent code and the classifier output of infoGAN. Then the extracted features are used to control the generation results similar to a vanilla cGAN framework. Case study is based on the time series datasets of power load and renewable energy output. Results demonstrate that infoGAN can extract both discrete and continuous features with clear physical meanings, as well as generating realistic synthetic time series that satisfy given features.
A Delay-Tolerant Potential-Field-Based Network Implementation of an Integrated Navigation System
Aug 23, 2016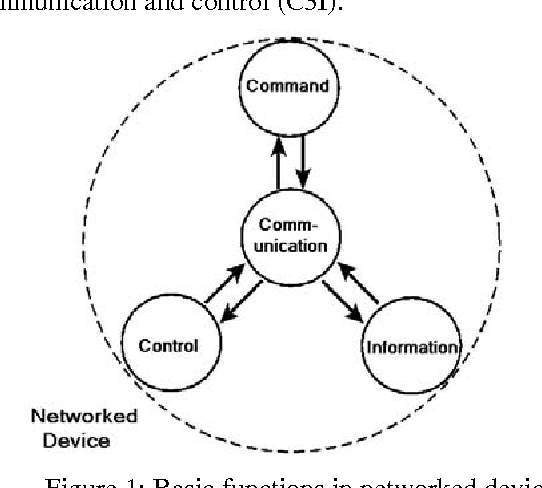
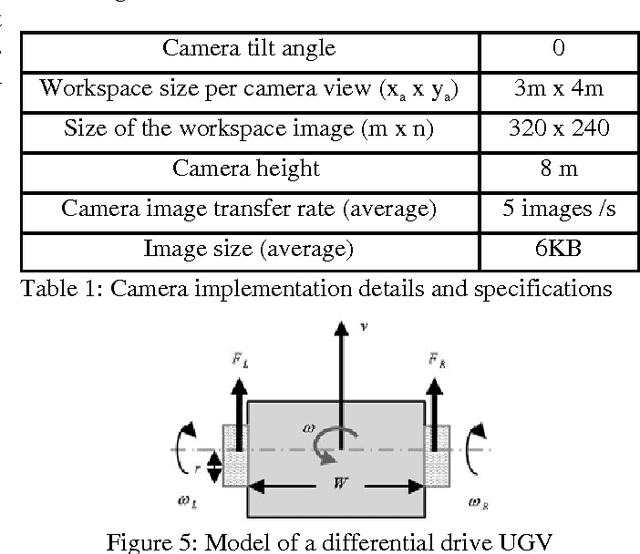
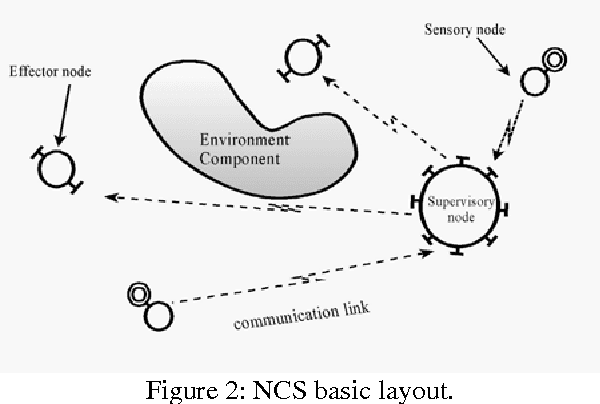
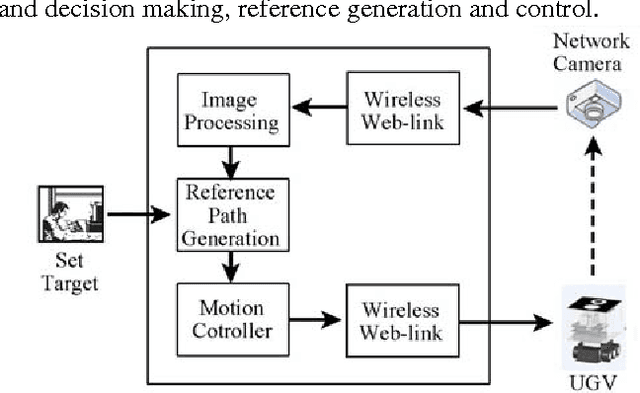
Network controllers (NCs) are devices that are capable of converting dynamic, spatially extended, and functionally specialized modules into a taskable goal-oriented group called networked control system. This paper examines the practical aspects of designing and building an NC that uses the Internet as a communication medium. It focuses on finding compatible controller components that can be integrated via a host structure in a manner that makes it possible to network, in real-time, a webcam, an unmanned ground vehicle (UGV), and a remote computer server along with the necessary operator software interface. The aim is to deskill the UGV navigation process and yet maintain a robust performance. The structure of the suggested controller, its components, and the manner in which they are interfaced are described. Thorough experimental results along with performance assessment and comparisons to a previously implemented NC are provided.