 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeurally Plausible Model of Robot Reaching Inspired by Infant Motor Babbling
Dec 31, 2017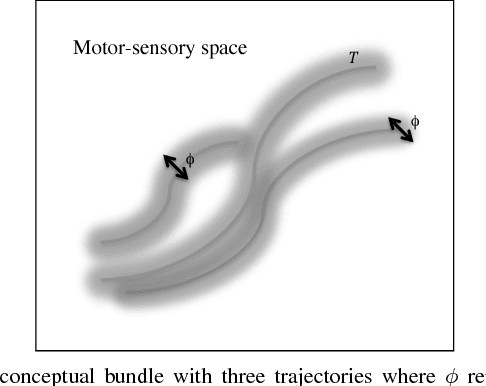
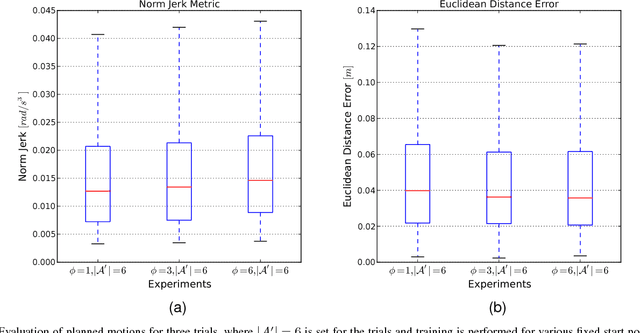
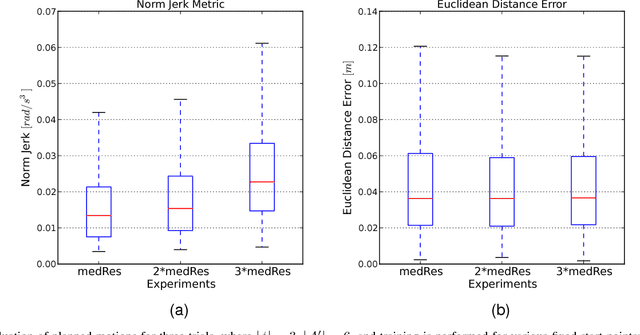
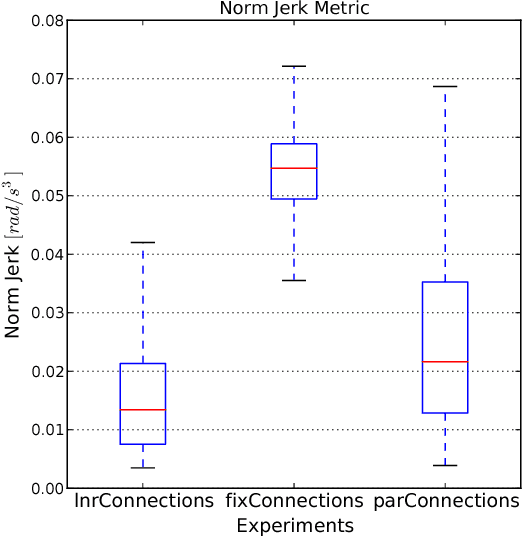
In this paper we present a neurally plausible model of robot reaching inspired by human infant reaching that is based on embodied artificial intelligence, which emphasizes the importance of the sensory-motor interaction of an agent and the world. This model encompasses both learning sensory-motor correlations through motor babbling and also arm motion planning using spreading activation. This model is organized in three layers of neural maps with parallel structures representing the same sensory-motor space. The motor babbling period shapes the structure of the three neural maps as well as the connections within and between them. We describe an implementation of this model and an investigation of this implementation using a simple reaching task on a humanoid robot. The robot has learned successfully to plan reaching motions from a test set with high accuracy and smoothness.
Morphology dictates a robot's ability to ground crowd-proposed language
Dec 20, 2017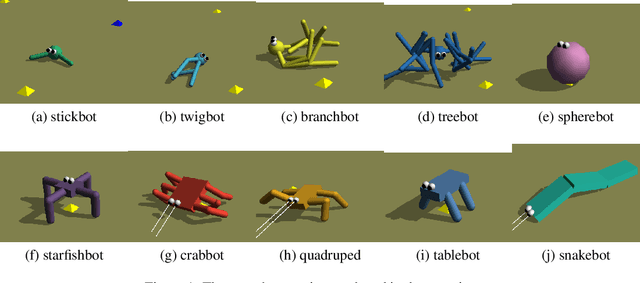
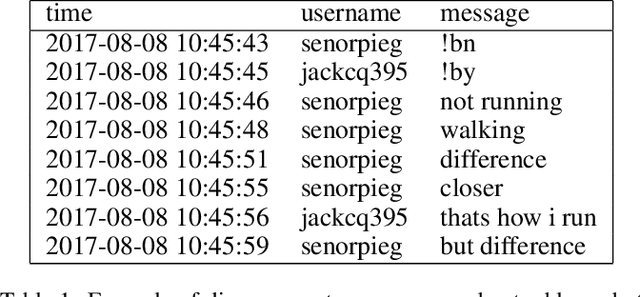
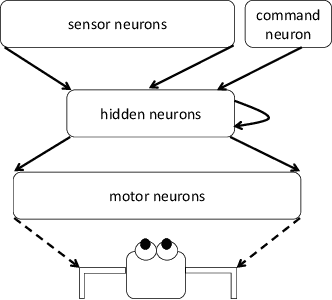
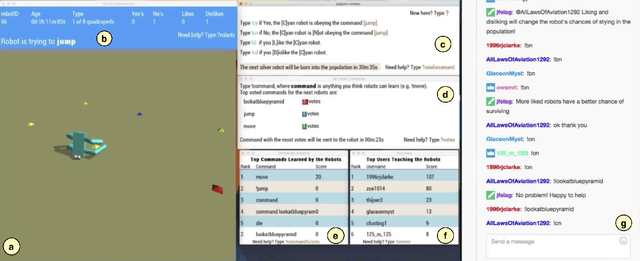
As more robots act in physical proximity to people, it is essential to ensure they make decisions and execute actions that align with human values. To do so, robots need to understand the true intentions behind human-issued commands. In this paper, we define a safe robot as one that receives a natural-language command from humans, considers an action in response to that command, and accurately predicts how humans will judge that action if is executed in reality. Our contribution is two-fold: First, we introduce a web platform for human users to propose commands to simulated robots. The robots receive commands and act based on those proposed commands, and then the users provide positive and/or negative reinforcement. Next, we train a critic for each robot to predict the crowd's responses to one of the crowd-proposed commands. Second, we show that the morphology of a robot plays a role in the way it grounds language: The critics show that two of the robots used in the experiment achieve a lower prediction error than the others. Thus, those two robots are safer, according to our definition, since they ground the proposed command more accurately.