 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTopographic Representation for Quantum Machine Learning
Oct 13, 2018

This paper proposes a brain-inspired approach to quantum machine learning with the goal of circumventing many of the complications of other approaches. The fact that quantum processes are unitary presents both opportunities and challenges. A principal opportunity is that a large number of computations can be carried out in parallel in linear superposition, that is, quantum parallelism. The challenge is that the process is linear, and most approaches to machine learning depend significantly on nonlinear processes. Fortunately, the situation is not hopeless, for we know that nonlinear processes can be embedded in unitary processes, as is familiar from the circuit model of quantum computation. This paper explores an approach to the quantum implementation of machine learning involving nonlinear functions operating on information represented topographically (by computational maps), as common in neural cortex.
Neurally Plausible Model of Robot Reaching Inspired by Infant Motor Babbling
Dec 31, 2017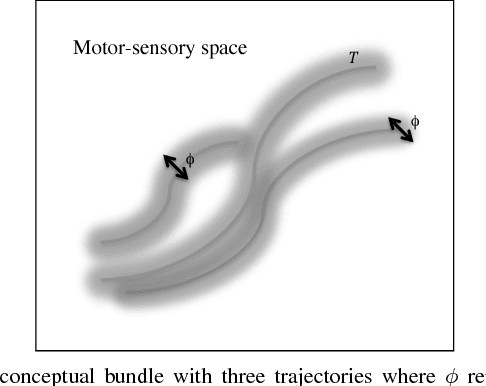
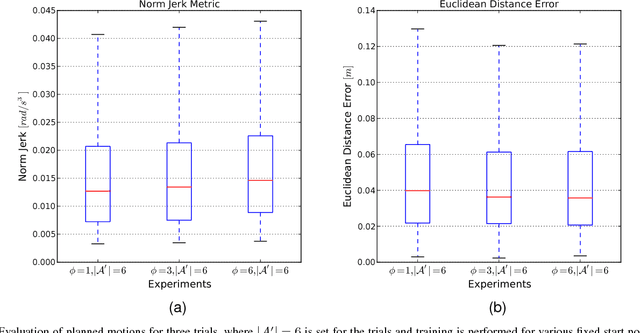
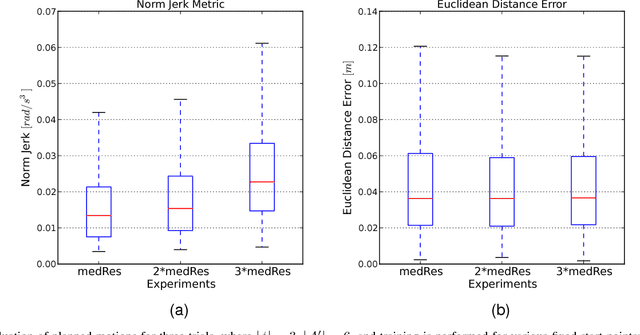
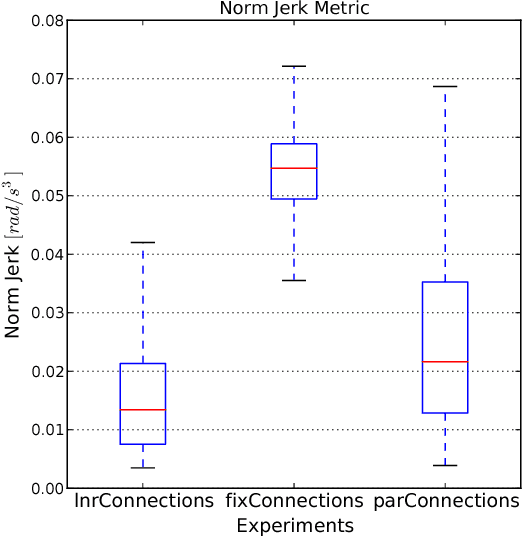
In this paper we present a neurally plausible model of robot reaching inspired by human infant reaching that is based on embodied artificial intelligence, which emphasizes the importance of the sensory-motor interaction of an agent and the world. This model encompasses both learning sensory-motor correlations through motor babbling and also arm motion planning using spreading activation. This model is organized in three layers of neural maps with parallel structures representing the same sensory-motor space. The motor babbling period shapes the structure of the three neural maps as well as the connections within and between them. We describe an implementation of this model and an investigation of this implementation using a simple reaching task on a humanoid robot. The robot has learned successfully to plan reaching motions from a test set with high accuracy and smoothness.