 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCycle-YOLO: A Efficient and Robust Framework for Pavement Damage Detection
May 28, 2024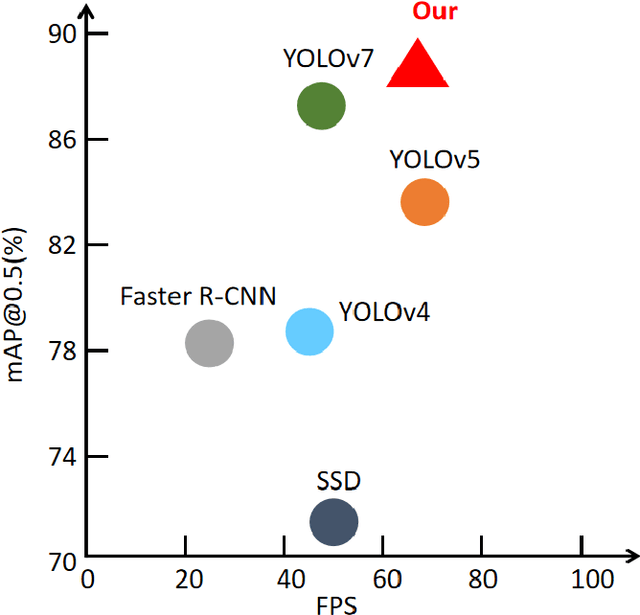
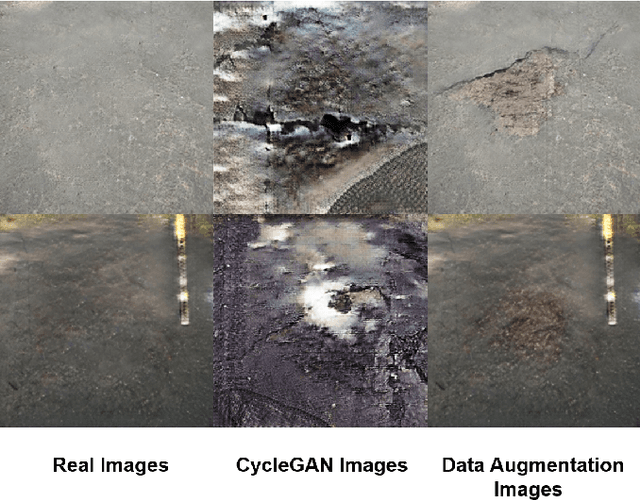
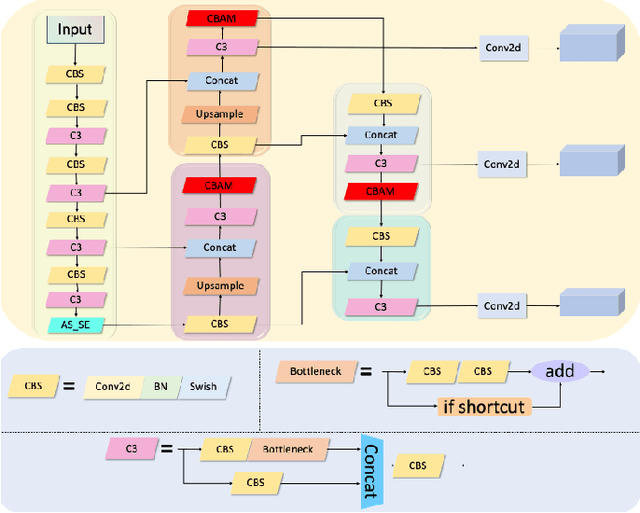
With the development of modern society, traffic volume continues to increase in most countries worldwide, leading to an increase in the rate of pavement damage Therefore, the real-time and highly accurate pavement damage detection and maintenance have become the current need. In this paper, an enhanced pavement damage detection method with CycleGAN and improved YOLOv5 algorithm is presented. We selected 7644 self-collected images of pavement damage samples as the initial dataset and augmented it by CycleGAN. Due to a substantial difference between the images generated by CycleGAN and real road images, we proposed a data enhancement method based on an improved Scharr filter, CycleGAN, and Laplacian pyramid. To improve the target recognition effect on a complex background and solve the problem that the spatial pyramid pooling-fast module in the YOLOv5 network cannot handle multiscale targets, we introduced the convolutional block attention module attention mechanism and proposed the atrous spatial pyramid pooling with squeeze-and-excitation structure. In addition, we optimized the loss function of YOLOv5 by replacing the CIoU with EIoU. The experimental results showed that our algorithm achieved a precision of 0.872, recall of 0.854, and mean average precision@0.5 of 0.882 in detecting three main types of pavement damage: cracks, potholes, and patching. On the GPU, its frames per second reached 68, meeting the requirements for real-time detection. Its overall performance even exceeded the current more advanced YOLOv7 and achieved good results in practical applications, providing a basis for decision-making in pavement damage detection and prevention.