 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScalable Safe Multi-Agent Reinforcement Learning for Multi-Agent System
Jan 23, 2025



Safety and scalability are two critical challenges faced by practical Multi-Agent Systems (MAS). However, existing Multi-Agent Reinforcement Learning (MARL) algorithms that rely solely on reward shaping are ineffective in ensuring safety, and their scalability is rather limited due to the fixed-size network output. To address these issues, we propose a novel framework, Scalable Safe MARL (SS-MARL), to enhance the safety and scalability of MARL methods. Leveraging the inherent graph structure of MAS, we design a multi-layer message passing network to aggregate local observations and communications of varying sizes. Furthermore, we develop a constrained joint policy optimization method in the setting of local observation to improve safety. Simulation experiments demonstrate that SS-MARL achieves a better trade-off between optimality and safety compared to baselines, and its scalability significantly outperforms the latest methods in scenarios with a large number of agents. The feasibility of our method is also verified by hardware implementation with Mecanum-wheeled vehicles.
RealNet: Combining Optimized Object Detection with Information Fusion Depth Estimation Co-Design Method on IoT
Apr 24, 2022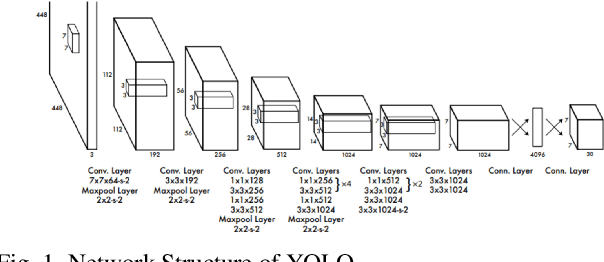
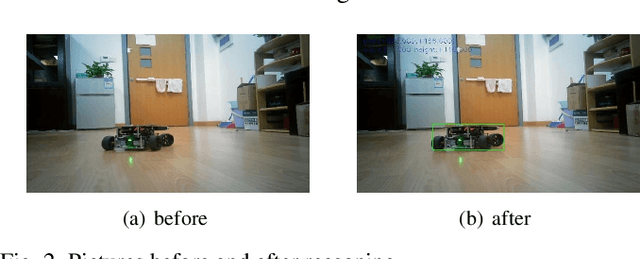
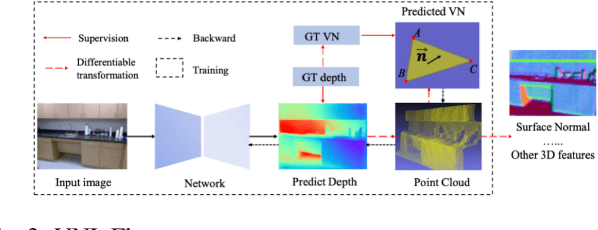
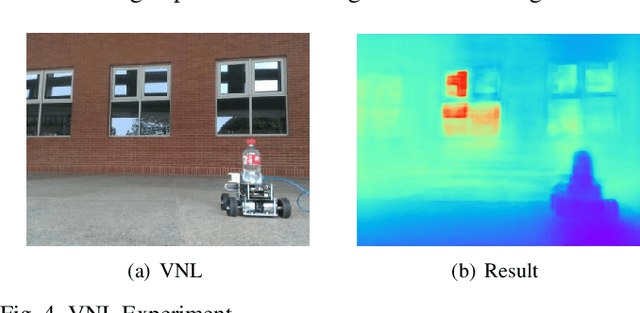
Depth Estimation and Object Detection Recognition play an important role in autonomous driving technology under the guidance of deep learning artificial intelligence. We propose a hybrid structure called RealNet: a co-design method combining the model-streamlined recognition algorithm, the depth estimation algorithm with information fusion, and deploying them on the Jetson-Nano for unmanned vehicles with monocular vision sensors. We use ROS for experiment. The method proposed in this paper is suitable for mobile platforms with high real-time request. Innovation of our method is using information fusion to compensate the problem of insufficient frame rate of output image, and improve the robustness of target detection and depth estimation under monocular vision.Object Detection is based on YOLO-v5. We have simplified the network structure of its DarkNet53 and realized a prediction speed up to 0.01s. Depth Estimation is based on the VNL Depth Estimation, which considers multiple geometric constraints in 3D global space. It calculates the loss function by calculating the deviation of the virtual normal vector VN and the label, which can obtain deeper depth information. We use PnP fusion algorithm to solve the problem of insufficient frame rate of depth map output. It solves the motion estimation depth from three-dimensional target to two-dimensional point based on corner feature matching, which is faster than VNL calculation. We interpolate VNL output and PnP output to achieve information fusion. Experiments show that this can effectively eliminate the jitter of depth information and improve robustness. At the control end, this method combines the results of target detection and depth estimation to calculate the target position, and uses a pure tracking control algorithm to track it.
A Variational Bayes Moving Horizon Estimation Adaptive Filter with Guaranteed Stability
Oct 10, 2021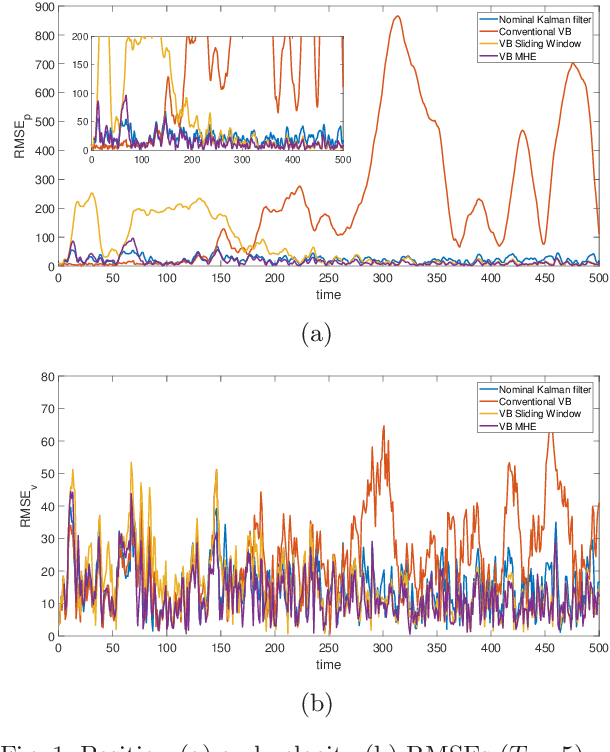


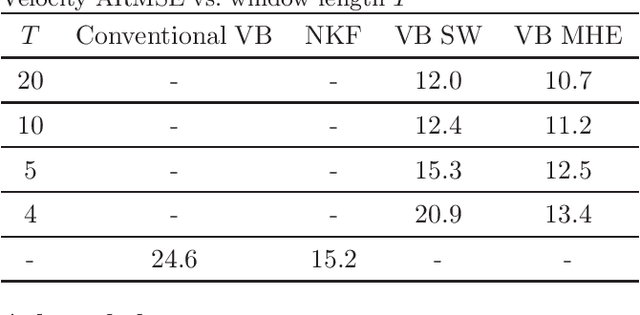
This paper addresses state estimation of linear systems with special attention on unknown process and measurement noise covariances, aiming to enhance estimation accuracy while preserving the stability guarantee of the Kalman filter. To this end, the full information estimation problem over a finite interval is firstly addressed. Then, a novel adaptive variational Bayesian (VB) moving horizon estimation (MHE) method is proposed, exploiting VB inference, MHE and Monte Carlo integration with importance sampling for joint estimation of the unknown process and measurement noise covariances, along with the state trajectory over a moving window of fixed length. Further, it is proved that the proposed adaptive VB MHE filter ensures mean-square boundedness of the estimation error with any number of importance samples and VB iterations, as well as for any window length. Finally, simulation results on a target tracking example demonstrate the effectiveness of the VB MHE filter with enhanced estimation accuracy and convergence properties compared to the conventional non-adaptive Kalman filter and other existing adaptive filters.