 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExtended Object Tracking and Classification based on Linear Splines
Oct 31, 2024



This paper introduces a framework based on linear splines for 2-dimensional extended object tracking and classification. Unlike state of the art models, linear splines allow to represent extended objects whose contour is an arbitrarily complex curve. An exact likelihood is derived for the case in which noisy measurements can be scattered from any point on the contour of the extended object, while an approximate Monte Carlo likelihood is provided for the case wherein scattering points can be anywhere, i.e. inside or on the contour, on the object surface. Exploiting such likelihood to measure how well the observed data fit a given shape, a suitable estimator is developed. The proposed estimator models the extended object in terms of a kinematic state, providing object position and orientation, along with a shape vector, characterizing object contour and surface. The kinematic state is estimated via a nonlinear Kalman filter, while the shape vector is estimated via a Bayesian classifier so that classification is implicitly solved during shape estimation. Numerical experiments are provided to assess, compared to state of the art extended object estimators, the effectiveness of the proposed one.
A Variational Bayes Moving Horizon Estimation Adaptive Filter with Guaranteed Stability
Oct 10, 2021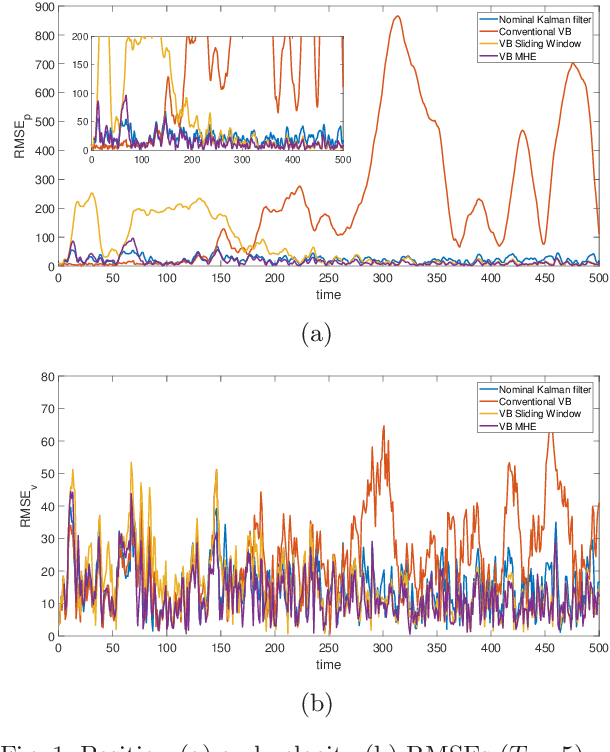


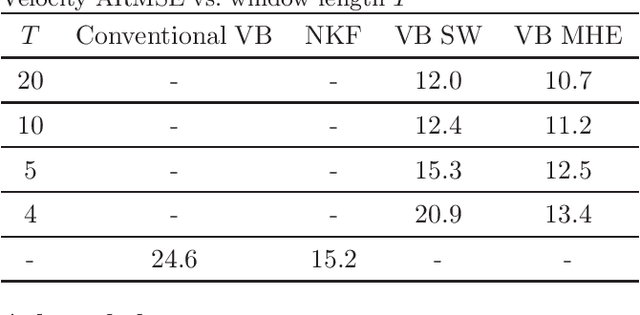
This paper addresses state estimation of linear systems with special attention on unknown process and measurement noise covariances, aiming to enhance estimation accuracy while preserving the stability guarantee of the Kalman filter. To this end, the full information estimation problem over a finite interval is firstly addressed. Then, a novel adaptive variational Bayesian (VB) moving horizon estimation (MHE) method is proposed, exploiting VB inference, MHE and Monte Carlo integration with importance sampling for joint estimation of the unknown process and measurement noise covariances, along with the state trajectory over a moving window of fixed length. Further, it is proved that the proposed adaptive VB MHE filter ensures mean-square boundedness of the estimation error with any number of importance samples and VB iterations, as well as for any window length. Finally, simulation results on a target tracking example demonstrate the effectiveness of the VB MHE filter with enhanced estimation accuracy and convergence properties compared to the conventional non-adaptive Kalman filter and other existing adaptive filters.
Multi-sensor joint target detection, tracking and classification via Bernoulli filter
Sep 23, 2021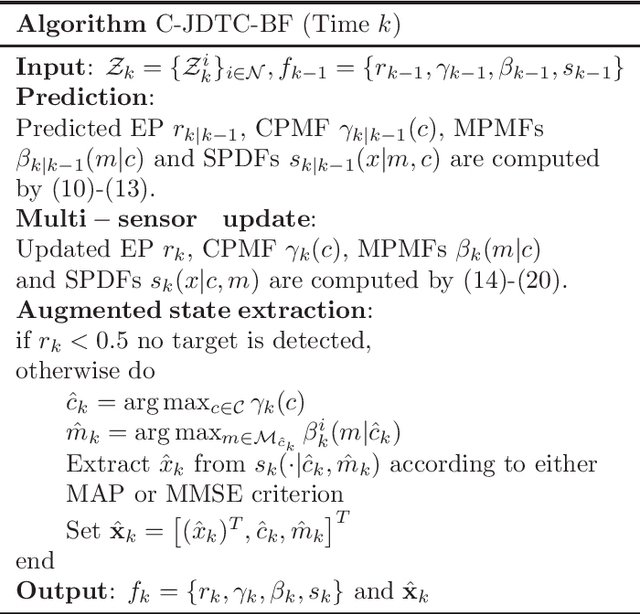
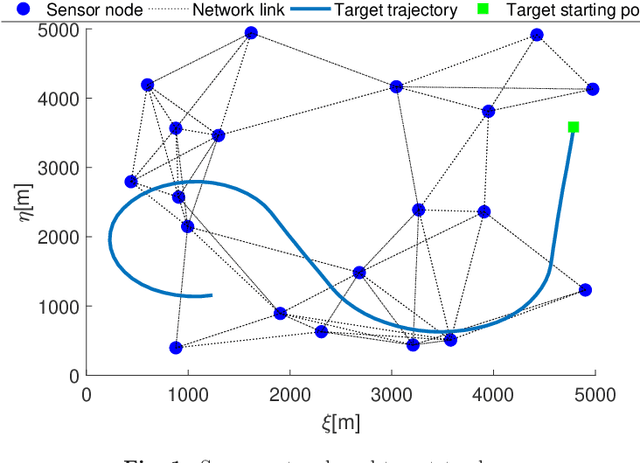
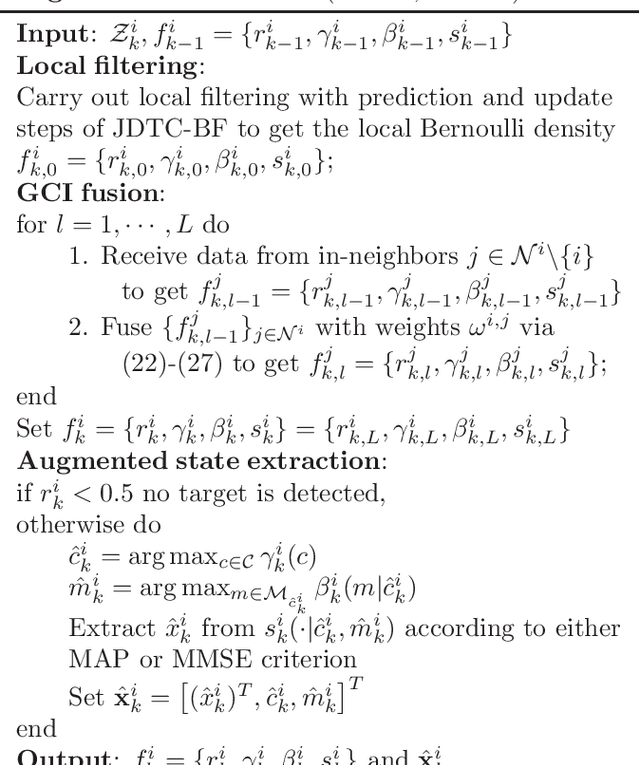
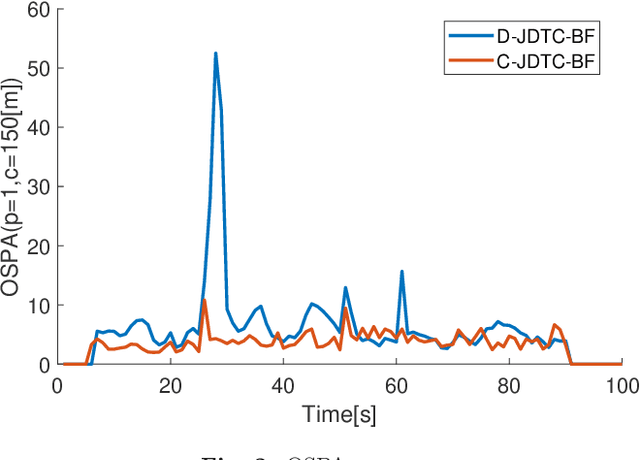
This paper focuses on \textit{joint detection, tracking and classification} (JDTC) of a target via multi-sensor fusion. The target can be present or not, can belong to different classes, and depending on its class can behave according to different kinematic modes. Accordingly, it is modeled as a suitably extended Bernoulli \textit{random finite set} (RFS) uniquely characterized by existence, classification, class-conditioned mode and class\&mode-conditioned state probability distributions. By designing suitable centralized and distributed rules for fusing information on target existence, class, mode and state from different sensor nodes, novel \textit{centralized} and \textit{distributed} JDTC \textit{Bernoulli filters} (C-JDTC-BF and D-JDTC-BF), are proposed. The performance of the proposed JDTC-BF approach is evaluated by means of simulation experiments.
Memory Unscented Particle Filter for 6-DOF Tactile Localization
Nov 10, 2016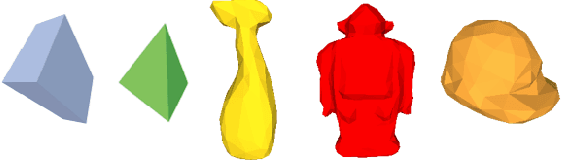
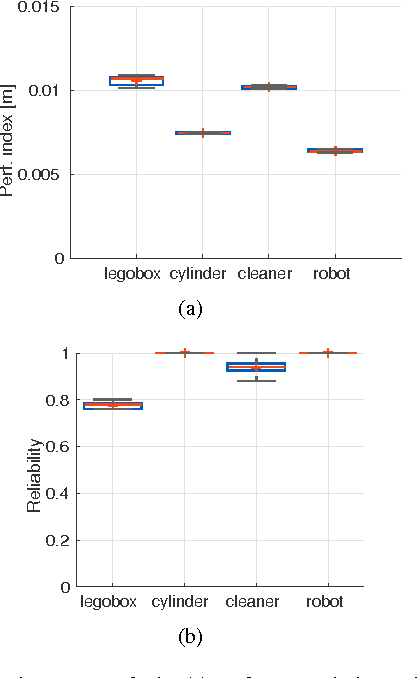
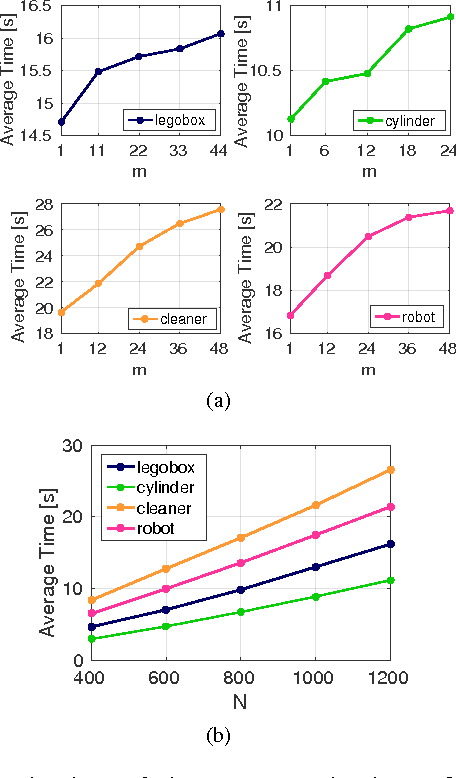
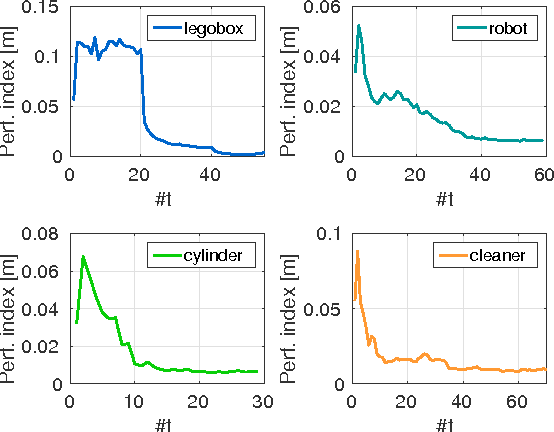
This paper addresses 6-DOF (degree-of-freedom) tactile localization, i.e. the pose estimation of tridimensional objects given tactile measurements. This estimation problem is fundamental for the operation of autonomous robots that are often required to manipulate and grasp objects whose pose is a-priori unknown. The nature of tactile measurements, the strict time requirements for real-time operation and the multimodality of the involved probability distributions pose remarkable challenges and call for advanced nonlinear filtering techniques. Following a Bayesian approach, this paper proposes a novel and effective algorithm, named Memory Unscented Particle Filter (MUPF), which solves the 6-DOF localization problem recursively in real-time by only exploiting contact point measurements. MUPF combines a modified particle filter that incorporates a sliding memory of past measurements to better handle multimodal distributions, along with the unscented Kalman filter that moves the particles towards regions of the search space that are more likely with the measurements. The performance of the proposed MUPF algorithm has been assessed both in simulation and on a real robotic system equipped with tactile sensors (i.e., the iCub humanoid robot). The experiments show that the algorithm provides accurate and reliable localization even with a low number of particles and, hence, is compatible with real-time requirements.