 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-sensor joint target detection, tracking and classification via Bernoulli filter
Sep 23, 2021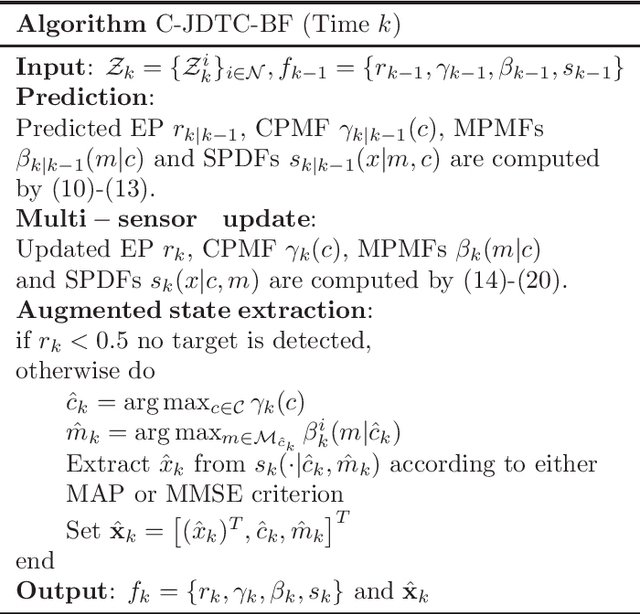
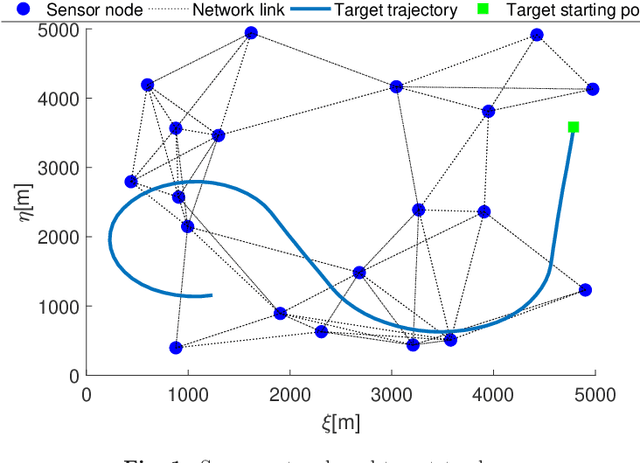
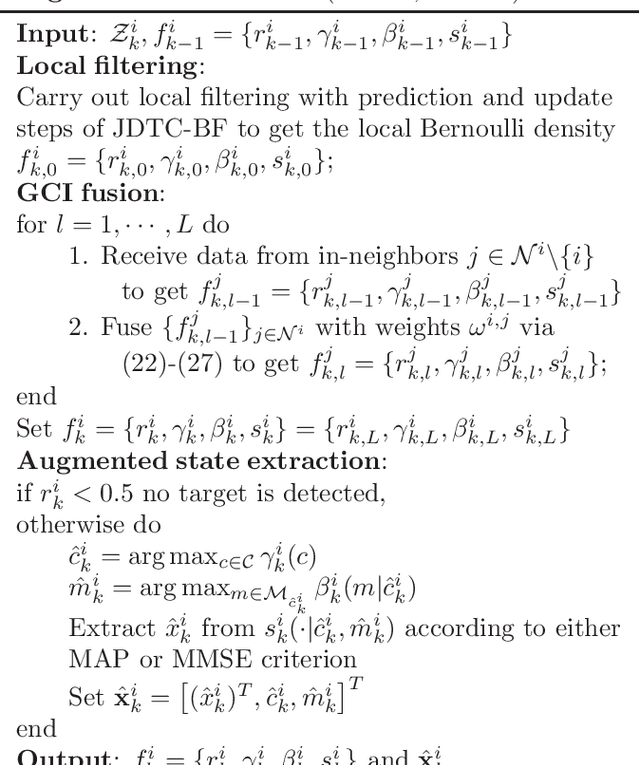
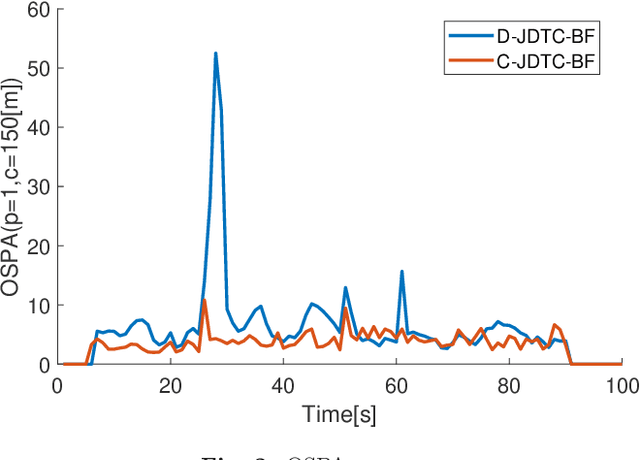
This paper focuses on \textit{joint detection, tracking and classification} (JDTC) of a target via multi-sensor fusion. The target can be present or not, can belong to different classes, and depending on its class can behave according to different kinematic modes. Accordingly, it is modeled as a suitably extended Bernoulli \textit{random finite set} (RFS) uniquely characterized by existence, classification, class-conditioned mode and class\&mode-conditioned state probability distributions. By designing suitable centralized and distributed rules for fusing information on target existence, class, mode and state from different sensor nodes, novel \textit{centralized} and \textit{distributed} JDTC \textit{Bernoulli filters} (C-JDTC-BF and D-JDTC-BF), are proposed. The performance of the proposed JDTC-BF approach is evaluated by means of simulation experiments.