 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGradient-Adaptive Policy Optimization: Towards Multi-Objective Alignment of Large Language Models
Jul 02, 2025Reinforcement Learning from Human Feedback (RLHF) has emerged as a powerful technique for aligning large language models (LLMs) with human preferences. However, effectively aligning LLMs with diverse human preferences remains a significant challenge, particularly when they are conflict. To address this issue, we frame human value alignment as a multi-objective optimization problem, aiming to maximize a set of potentially conflicting objectives. We introduce Gradient-Adaptive Policy Optimization (GAPO), a novel fine-tuning paradigm that employs multiple-gradient descent to align LLMs with diverse preference distributions. GAPO adaptively rescales the gradients for each objective to determine an update direction that optimally balances the trade-offs between objectives. Additionally, we introduce P-GAPO, which incorporates user preferences across different objectives and achieves Pareto solutions that better align with the user's specific needs. Our theoretical analysis demonstrates that GAPO converges towards a Pareto optimal solution for multiple objectives. Empirical results on Mistral-7B show that GAPO outperforms current state-of-the-art methods, achieving superior performance in both helpfulness and harmlessness.
Look Before You Leap: Safe Model-Based Reinforcement Learning with Human Intervention
Nov 16, 2021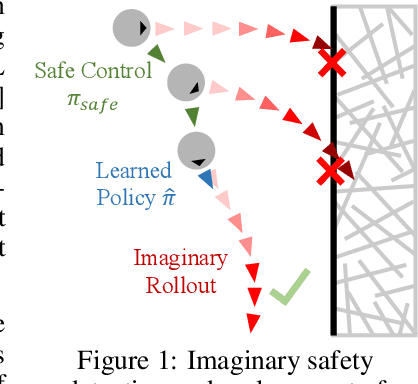
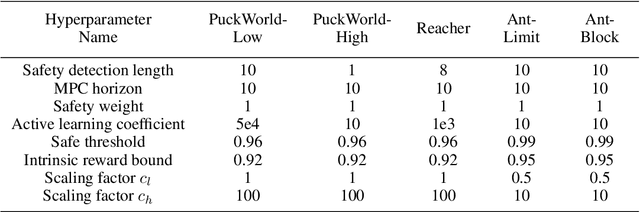
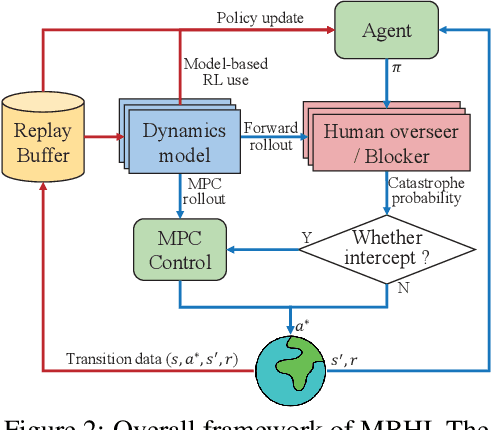
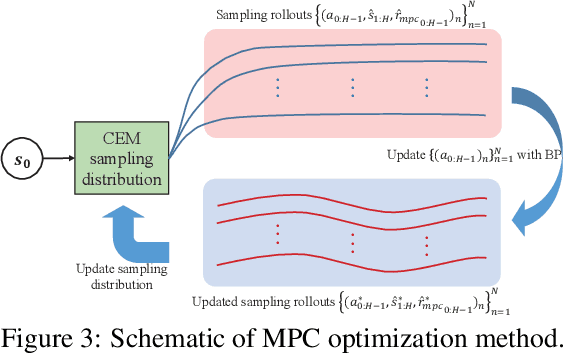
Safety has become one of the main challenges of applying deep reinforcement learning to real world systems. Currently, the incorporation of external knowledge such as human oversight is the only means to prevent the agent from visiting the catastrophic state. In this paper, we propose MBHI, a novel framework for safe model-based reinforcement learning, which ensures safety in the state-level and can effectively avoid both "local" and "non-local" catastrophes. An ensemble of supervised learners are trained in MBHI to imitate human blocking decisions. Similar to human decision-making process, MBHI will roll out an imagined trajectory in the dynamics model before executing actions to the environment, and estimate its safety. When the imagination encounters a catastrophe, MBHI will block the current action and use an efficient MPC method to output a safety policy. We evaluate our method on several safety tasks, and the results show that MBHI achieved better performance in terms of sample efficiency and number of catastrophes compared to the baselines.