 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast and Compute-efficient Sampling-based Local Exploration Planning via Distribution Learning
Feb 28, 2022
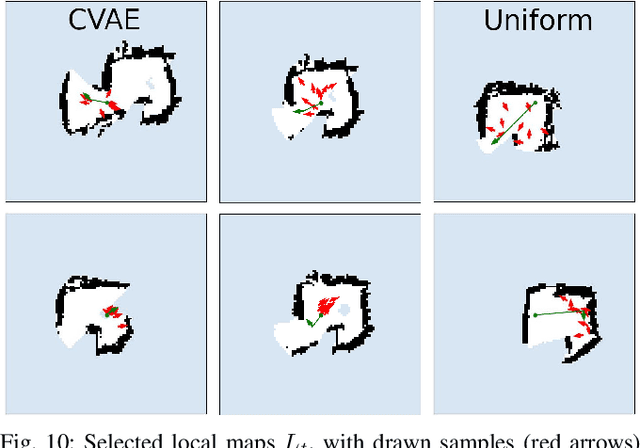


Exploration is a fundamental problem in robotics. While sampling-based planners have shown high performance, they are oftentimes compute intensive and can exhibit high variance. To this end, we propose to directly learn the underlying distribution of informative views based on the spatial context in the robot's map. We further explore a variety of methods to also learn the information gain. We show in thorough experimental evaluation that our proposed system improves exploration performance by up to 28\% over classical methods, and find that learning the gains in addition to the sampling distribution can provide favorable performance vs. compute trade-offs for compute-constrained systems. We demonstrate in simulation and on a low-cost mobile robot that our system generalizes well to varying environments.