 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Exploration Development Environment and the Planning Algorithms
Oct 27, 2021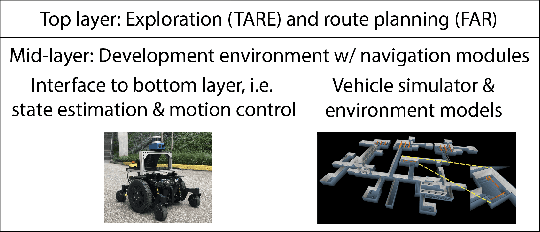
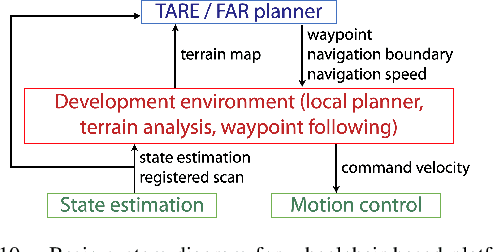
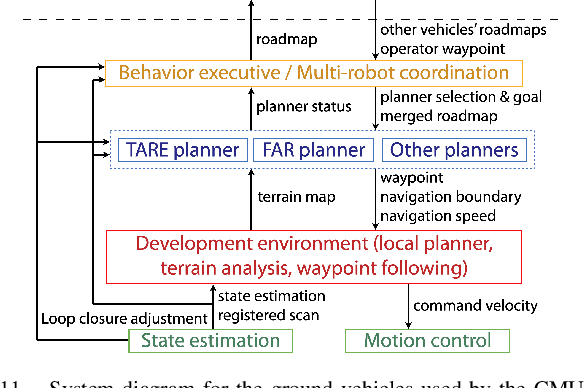
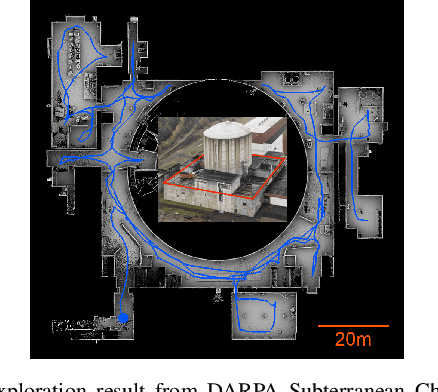
Autonomous Exploration Development Environment is an open-source repository released to facilitate the development of high-level planning algorithms and integration of complete autonomous navigation systems. The repository contains representative simulation environment models, fundamental navigation modules, e.g., local planner, terrain traversability analysis, waypoint following, and visualization tools. Together with two of our high-level planner releases -- TARE planner for exploration and FAR planner for route planning, we detail usage of the three open-source repositories and share experiences in the integration of autonomous navigation systems. We use DARPA Subterranean Challenge as a use case where the repositories together form the main navigation system of the CMU-OSU Team. In the end, we discuss a few potential use cases in extended applications.