 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Backbone for Long-Horizon Robot Task Understanding
Aug 07, 2024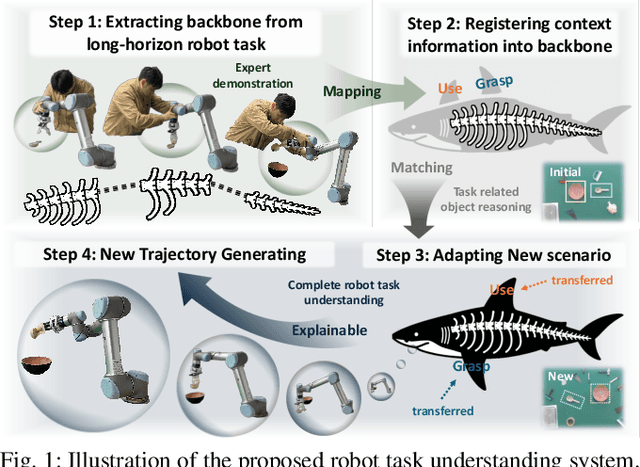
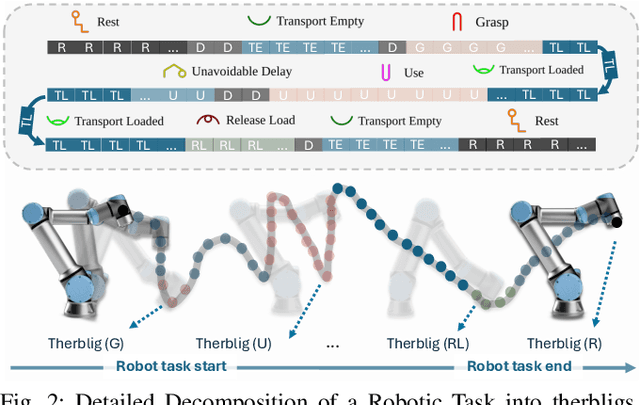
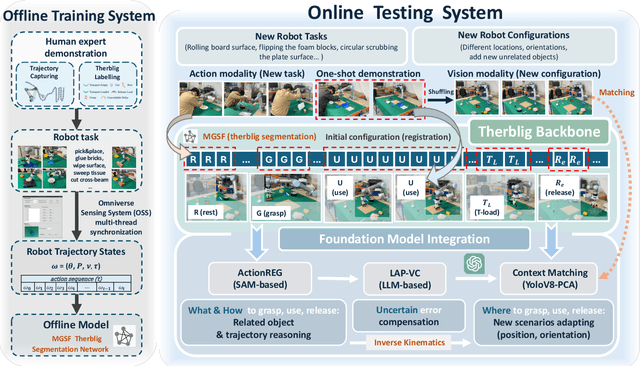
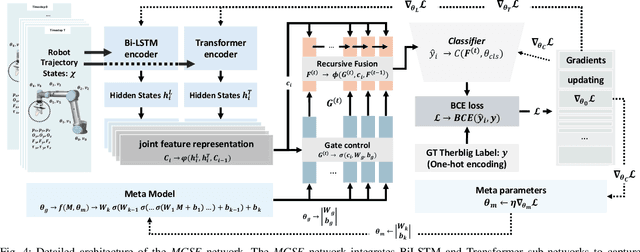
End-to-end robot learning, particularly for long-horizon tasks, often results in unpredictable outcomes and poor generalization. To address these challenges, we propose a novel Therblig-based Backbone Framework (TBBF) to enhance robot task understanding and transferability. This framework uses therbligs (basic action elements) as the backbone to decompose high-level robot tasks into elemental robot configurations, which are then integrated with current foundation models to improve task understanding. The approach consists of two stages: offline training and online testing. During the offline training stage, we developed the Meta-RGate SynerFusion (MGSF) network for accurate therblig segmentation across various tasks. In the online testing stage, after a one-shot demonstration of a new task is collected, our MGSF network extracts high-level knowledge, which is then encoded into the image using Action Registration (ActionREG). Additionally, the Large Language Model (LLM)-Alignment Policy for Visual Correction (LAP-VC) is employed to ensure precise action execution, facilitating trajectory transfer in novel robot scenarios. Experimental results validate these methods, achieving 94.37% recall in therblig segmentation and success rates of 94.4% and 80% in real-world online robot testing for simple and complex scenarios, respectively. Supplementary material is available at: https://sites.google.com/view/therbligsbasedbackbone/home