 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSingle upper limb pose estimation method based on improved stacked hourglass network
Apr 16, 2020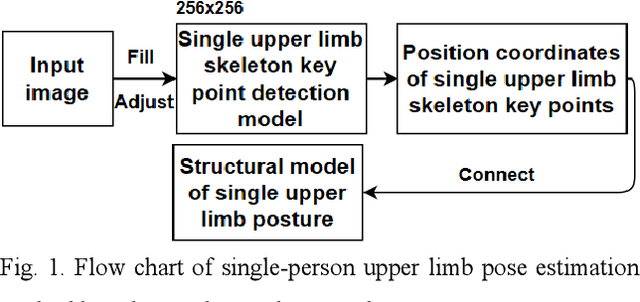
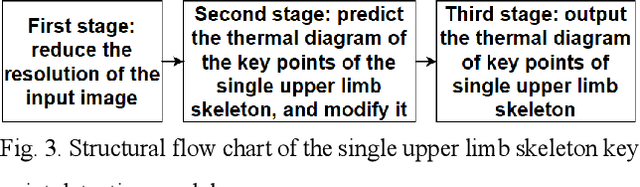
At present, most high-accuracy single-person pose estimation methods have high computational complexity and insufficient real-time performance due to the complex structure of the network model. However, a single-person pose estimation method with high real-time performance also needs to improve its accuracy due to the simple structure of the network model. It is currently difficult to achieve both high accuracy and real-time performance in single-person pose estimation. For use in human-machine cooperative operations, this paper proposes a single-person upper limb pose estimation method based on an end-to-end approach for accurate and real-time limb pose estimation. Using the stacked hourglass network model, a single-person upper limb skeleton key point detection model was designed.Deconvolution was employed to replace the up-sampling operation of the hourglass module in the original model, solving the problem of rough feature maps. Integral regression was used to calculate the position coordinates of key points of the skeleton, reducing quantization errors and calculations. Experiments showed that the developed single-person upper limb skeleton key point detection model achieves high accuracy and that the pose estimation method based on the end-to-end approach provides high accuracy and real-time performance.