 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMaterial Classification Using Active Temperature Controllable Robotic Gripper
Nov 30, 2021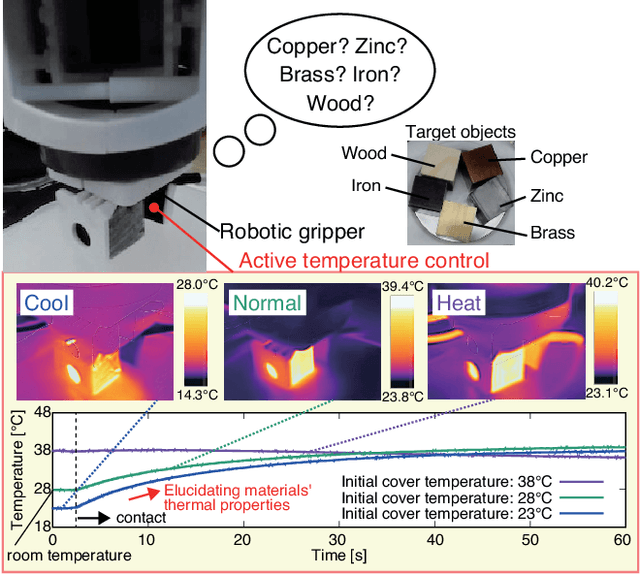
Recognition techniques allow robots to make proper planning and control strategies to manipulate various objects. Object recognition is more reliable when made by combining several percepts, e.g., vision and haptics. One of the distinguishing features of each object's material is its heat properties, and classification can exploit heat transfer, similarly to human thermal sensation. Thermal-based recognition has the advantage of obtaining contact surface information in realtime by simply capturing temperature change using a tiny and cheap sensor. However, heat transfer between a robot surface and a contact object is strongly affected by the initial temperature and environmental conditions. A given object's material cannot be recognized when its temperature is the same as the robotic grippertip. We present a material classification system using active temperature controllable robotic gripper to induce heat flow. Subsequently, our system can recognize materials independently from their ambient temperature. The robotic gripper surface can be regulated to any temperature that differentiates it from the touched object's surface. We conducted some experiments by integrating the temperature control system with the Academic SCARA Robot, classifying them based on a long short-term memory (LSTM) using temperature data obtained from grasping target objects.