 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollaborative Multi-Robot Non-Prehensile Manipulation via Flow-Matching Co-Generation
Nov 14, 2025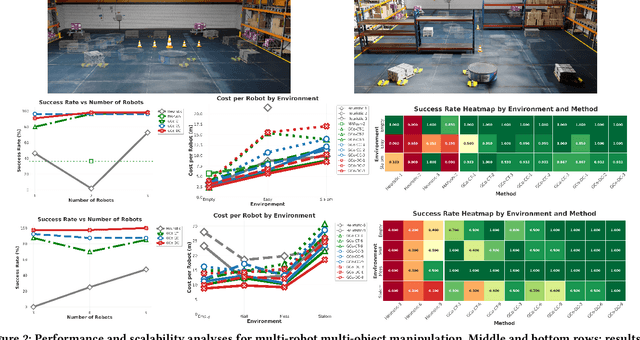
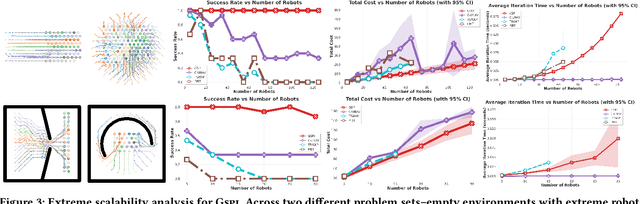

Coordinating a team of robots to reposition multiple objects in cluttered environments requires reasoning jointly about where robots should establish contact, how to manipulate objects once contact is made, and how to navigate safely and efficiently at scale. Prior approaches typically fall into two extremes -- either learning the entire task or relying on privileged information and hand-designed planners -- both of which struggle to handle diverse objects in long-horizon tasks. To address these challenges, we present a unified framework for collaborative multi-robot, multi-object non-prehensile manipulation that integrates flow-matching co-generation with anonymous multi-robot motion planning. Within this framework, a generative model co-generates contact formations and manipulation trajectories from visual observations, while a novel motion planner conveys robots at scale. Crucially, the same planner also supports coordination at the object level, assigning manipulated objects to larger target structures and thereby unifying robot- and object-level reasoning within a single algorithmic framework. Experiments in challenging simulated environments demonstrate that our approach outperforms baselines in both motion planning and manipulation tasks, highlighting the benefits of generative co-design and integrated planning for scaling collaborative manipulation to complex multi-agent, multi-object settings. Visit gco-paper.github.io for code and demonstrations.
Benchmarking Shortcutting Techniques for Multi-Robot-Arm Motion Planning
Aug 07, 2025Generating high-quality motion plans for multiple robot arms is challenging due to the high dimensionality of the system and the potential for inter-arm collisions. Traditional motion planning methods often produce motions that are suboptimal in terms of smoothness and execution time for multi-arm systems. Post-processing via shortcutting is a common approach to improve motion quality for efficient and smooth execution. However, in multi-arm scenarios, optimizing one arm's motion must not introduce collisions with other arms. Although existing multi-arm planning works often use some form of shortcutting techniques, their exact methodology and impact on performance are often vaguely described. In this work, we present a comprehensive study quantitatively comparing existing shortcutting methods for multi-arm trajectories across diverse simulated scenarios. We carefully analyze the pros and cons of each shortcutting method and propose two simple strategies for combining these methods to achieve the best performance-runtime tradeoff. Video, code, and dataset are available at https://philip-huang.github.io/mr-shortcut/.
MOSAIC: A Skill-Centric Algorithmic Framework for Long-Horizon Manipulation Planning
Apr 23, 2025Planning long-horizon motions using a set of predefined skills is a key challenge in robotics and AI. Addressing this challenge requires methods that systematically explore skill combinations to uncover task-solving sequences, harness generic, easy-to-learn skills (e.g., pushing, grasping) to generalize across unseen tasks, and bypass reliance on symbolic world representations that demand extensive domain and task-specific knowledge. Despite significant progress, these elements remain largely disjoint in existing approaches, leaving a critical gap in achieving robust, scalable solutions for complex, long-horizon problems. In this work, we present MOSAIC, a skill-centric framework that unifies these elements by using the skills themselves to guide the planning process. MOSAIC uses two families of skills: Generators compute executable trajectories and world configurations, and Connectors link these independently generated skill trajectories by solving boundary value problems, enabling progress toward completing the overall task. By breaking away from the conventional paradigm of incrementally discovering skills from predefined start or goal states--a limitation that significantly restricts exploration--MOSAIC focuses planning efforts on regions where skills are inherently effective. We demonstrate the efficacy of MOSAIC in both simulated and real-world robotic manipulation tasks, showcasing its ability to solve complex long-horizon planning problems using a diverse set of skills incorporating generative diffusion models, motion planning algorithms, and manipulation-specific models. Visit https://skill-mosaic.github.io for demonstrations and examples.
Multi-Robot Motion Planning with Diffusion Models
Oct 04, 2024



Diffusion models have recently been successfully applied to a wide range of robotics applications for learning complex multi-modal behaviors from data. However, prior works have mostly been confined to single-robot and small-scale environments due to the high sample complexity of learning multi-robot diffusion models. In this paper, we propose a method for generating collision-free multi-robot trajectories that conform to underlying data distributions while using only single-robot data. Our algorithm, Multi-robot Multi-model planning Diffusion (MMD), does so by combining learned diffusion models with classical search-based techniques -- generating data-driven motions under collision constraints. Scaling further, we show how to compose multiple diffusion models to plan in large environments where a single diffusion model fails to generalize well. We demonstrate the effectiveness of our approach in planning for dozens of robots in a variety of simulated scenarios motivated by logistics environments. View video demonstrations in our supplementary material, and our code at: https://github.com/yoraish/mmd.
Unconstraining Multi-Robot Manipulation: Enabling Arbitrary Constraints in ECBS with Bounded Sub-Optimality
May 07, 2024



Multi-Robot-Arm Motion Planning (M-RAMP) is a challenging problem featuring complex single-agent planning and multi-agent coordination. Recent advancements in extending the popular Conflict-Based Search (CBS) algorithm have made large strides in solving Multi-Agent Path Finding (MAPF) problems. However, fundamental challenges remain in applying CBS to M-RAMP. A core challenge is the existing reliance of the CBS framework on conservative "complete" constraints. These constraints ensure solution guarantees but often result in slow pruning of the search space -- causing repeated expensive single-agent planning calls. Therefore, even though it is possible to leverage domain knowledge and design incomplete M-RAMP-specific CBS constraints to more efficiently prune the search, using these constraints would render the algorithm itself incomplete. This forces practitioners to choose between efficiency and completeness. In light of these challenges, we propose a novel algorithm, Generalized ECBS, aimed at removing the burden of choice between completeness and efficiency in MAPF algorithms. Our approach enables the use of arbitrary constraints in conflict-based algorithms while preserving completeness and bounding sub-optimality. This enables practitioners to capitalize on the benefits of arbitrary constraints and opens a new space for constraint design in MAPF that has not been explored. We provide a theoretical analysis of our algorithms, propose new "incomplete" constraints, and demonstrate their effectiveness through experiments in M-RAMP.
Accelerating Search-Based Planning for Multi-Robot Manipulation by Leveraging Online-Generated Experiences
Mar 29, 2024



An exciting frontier in robotic manipulation is the use of multiple arms at once. However, planning concurrent motions is a challenging task using current methods. The high-dimensional composite state space renders many well-known motion planning algorithms intractable. Recently, Multi-Agent Path-Finding (MAPF) algorithms have shown promise in discrete 2D domains, providing rigorous guarantees. However, widely used conflict-based methods in MAPF assume an efficient single-agent motion planner. This poses challenges in adapting them to manipulation cases where this assumption does not hold, due to the high dimensionality of configuration spaces and the computational bottlenecks associated with collision checking. To this end, we propose an approach for accelerating conflict-based search algorithms by leveraging their repetitive and incremental nature -- making them tractable for use in complex scenarios involving multi-arm coordination in obstacle-laden environments. We show that our method preserves completeness and bounded sub-optimality guarantees, and demonstrate its practical efficacy through a set of experiments with up to 10 robotic arms.