 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCTP: A hybrid CNN-Transformer-PINN model for ocean front forecasting
May 16, 2025This paper proposes CTP, a novel deep learning framework that integrates convolutional neural network(CNN), Transformer architectures, and physics-informed neural network(PINN) for ocean front prediction. Ocean fronts, as dynamic interfaces between distinct water masses, play critical roles in marine biogeochemical and physical processes. Existing methods such as LSTM, ConvLSTM, and AttentionConv often struggle to maintain spatial continuity and physical consistency over multi-step forecasts. CTP addresses these challenges by combining localized spatial encoding, long-range temporal attention, and physical constraint enforcement. Experimental results across south China sea(SCS) and Kuroshio(KUR) regions from 1993 to 2020 demonstrate that CTP achieves state-of-the-art(SOTA) performance in both single-step and multi-step predictions, significantly outperforming baseline models in accuracy, $F_1$ score, and temporal stability.
An ocean front detection and tracking algorithm
Feb 21, 2025

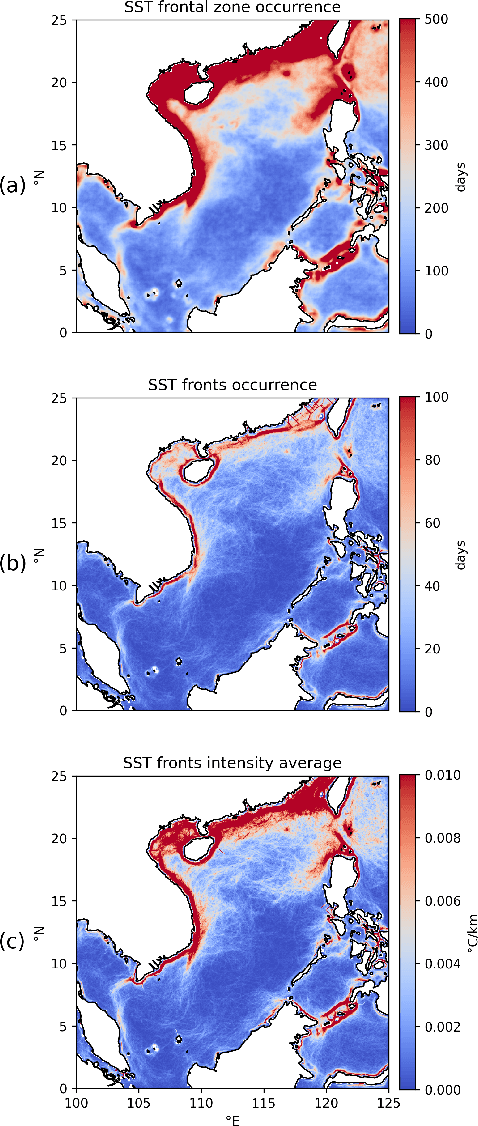

Ocean front is defined as the interface between different water masses and plays a vital role in the evolution of many physical phenomena. Previous detection methods are based on histogram, Lyapunov exponent, gradient and machine learning. These algorithms, however, introduce discontinuity, inaccuracy, use less information or just approaching traditional results. Moreover, automatic front tracking algrorithm is not open source in preceding studies. This paper foucuses on large-scale ocean fronts and proposes an automatic front detection and tracking algorithm based on Bayesian decision and metric space. In this, front merging, filling and ring deletion are put forward to enhance continuity. The distance between fronts in different days is firstly defined and is well-defined in metric space for functional analysis. These technologies can be migrated to other areas of computer vision such as edge detection and tracking.
Talk to Parallel LiDARs: A Human-LiDAR Interaction Method Based on 3D Visual Grounding
May 24, 2024



LiDAR sensors play a crucial role in various applications, especially in autonomous driving. Current research primarily focuses on optimizing perceptual models with point cloud data as input, while the exploration of deeper cognitive intelligence remains relatively limited. To address this challenge, parallel LiDARs have emerged as a novel theoretical framework for the next-generation intelligent LiDAR systems, which tightly integrate physical, digital, and social systems. To endow LiDAR systems with cognitive capabilities, we introduce the 3D visual grounding task into parallel LiDARs and present a novel human-computer interaction paradigm for LiDAR systems. We propose Talk2LiDAR, a large-scale benchmark dataset tailored for 3D visual grounding in autonomous driving. Additionally, we present a two-stage baseline approach and an efficient one-stage method named BEVGrounding, which significantly improves grounding accuracy by fusing coarse-grained sentence and fine-grained word embeddings with visual features. Our experiments on Talk2Car-3D and Talk2LiDAR datasets demonstrate the superior performance of BEVGrounding, laying a foundation for further research in this domain.