 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Smooth and Robust Space Robotic Manipulation of Dynamic Target via Inter-frame Correlation
Mar 29, 2026On-orbit servicing represents a critical frontier in future aerospace engineering, with the manipulation of dynamic non-cooperative targets serving as a key technology. In microgravity environments, objects are typically free-floating, lacking the support and frictional constraints found on Earth, which significantly escalates the complexity of tasks involving space robotic manipulation. Conventional planning and control-based methods are primarily limited to known, static scenarios and lack real-time responsiveness. To achieve precise robotic manipulation of dynamic targets in unknown and unstructured space environments, this letter proposes a data-driven space robotic manipulation approach that integrates historical temporal information and inter-frame correlation mechanisms. By exploiting the temporal correlation between historical and current frames, the system can effectively capture motion features within the scene, thereby producing stable and smooth manipulation trajectories for dynamic targets. To validate the effectiveness of the proposed method, we developed a ground-based experimental platform consisting of a PIPER X robotic arm and a dual-axis linear stage, which accurately simulates micro-gravity free-floating motion in a 2D plane.
The System Description of dun_oscar team for The ICPR MSR Challenge
Mar 13, 2023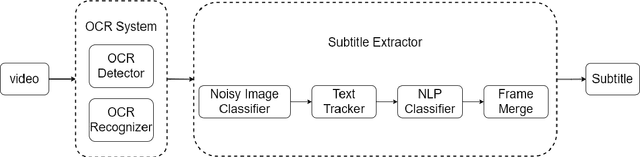


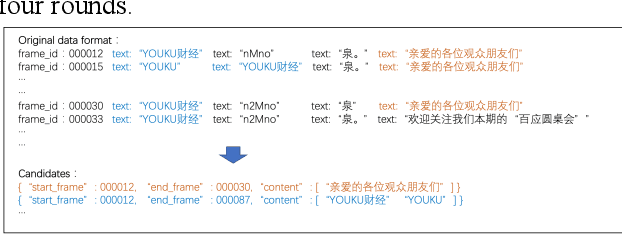
This paper introduces the system submitted by dun_oscar team for the ICPR MSR Challenge. Three subsystems for task1-task3 are descripted respectively. In task1, we develop a visual system which includes a OCR model, a text tracker, and a NLP classifier for distinguishing subtitles and non-subtitles. In task2, we employ an ASR system which includes an AM with 18 layers and a 4-gram LM. Semi-supervised learning on unlabeled data is also vital. In task3, we employ the ASR system to improve the visual system, some false subtitles can be corrected by a fusion module.
BBS-KWS:The Mandarin Keyword Spotting System Won the Video Keyword Wakeup Challenge
Dec 03, 2021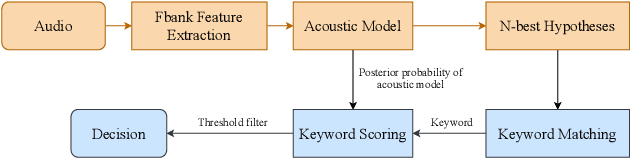

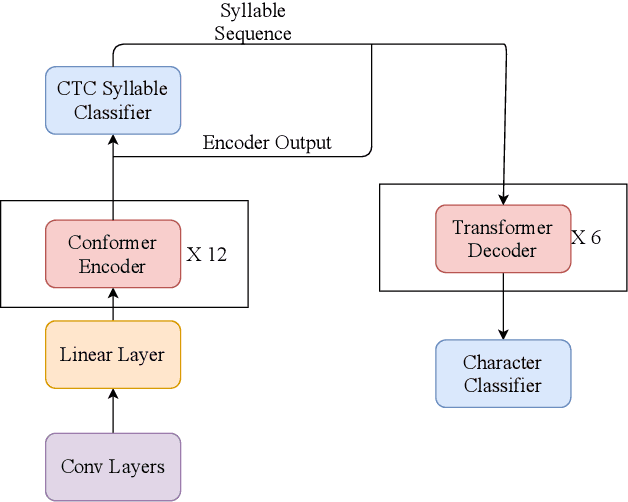
This paper introduces the system submitted by the Yidun NISP team to the video keyword wakeup challenge. We propose a mandarin keyword spotting system (KWS) with several novel and effective improvements, including a big backbone (B) model, a keyword biasing (B) mechanism and the introduction of syllable modeling units (S). By considering this, we term the total system BBS-KWS as an abbreviation. The BBS-KWS system consists of an end-to-end automatic speech recognition (ASR) module and a KWS module. The ASR module converts speech features to text representations, which applies a big backbone network to the acoustic model and takes syllable modeling units into consideration as well. In addition, the keyword biasing mechanism is used to improve the recall rate of keywords in the ASR inference stage. The KWS module applies multiple criteria to determine the absence or presence of the keywords, such as multi-stage matching, fuzzy matching, and connectionist temporal classification (CTC) prefix score. To further improve our system, we conduct semi-supervised learning on the CN-Celeb dataset for better generalization. In the VKW task, the BBS-KWS system achieves significant gains over the baseline and won the first place in two tracks.