 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCOOR-PLT: A hierarchical control model for coordinating adaptive platoons of connected and autonomous vehicles at signal-free intersections based on deep reinforcement learning
Jul 01, 2022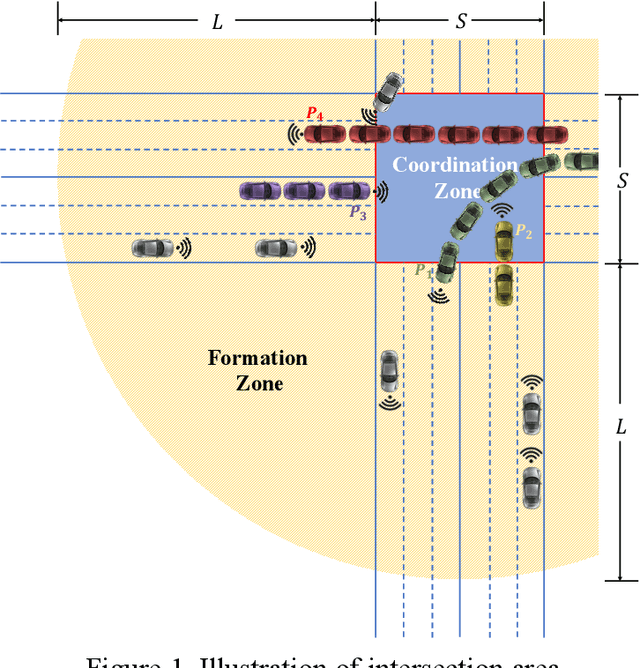
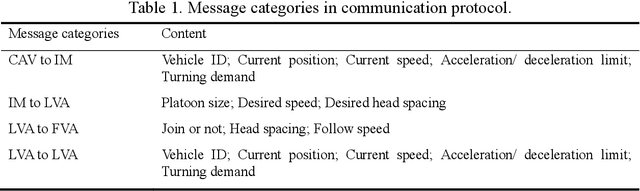
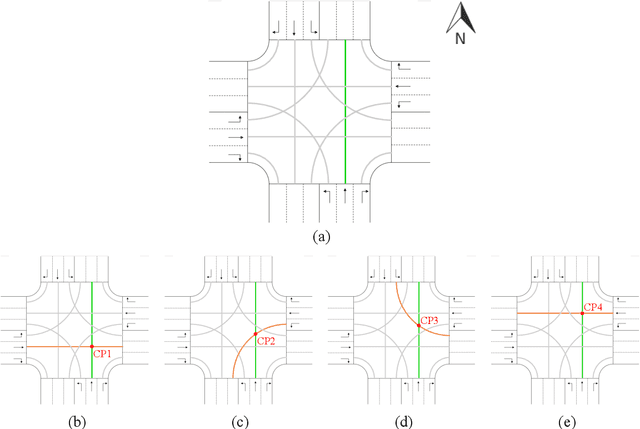
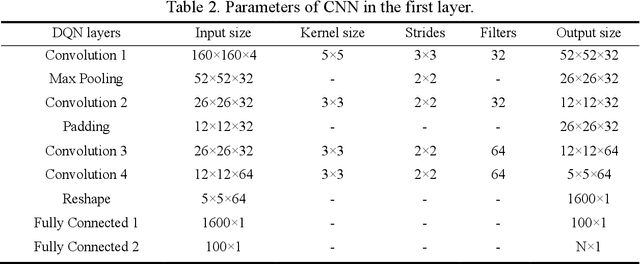
Platooning and coordination are two implementation strategies that are frequently proposed for traffic control of connected and autonomous vehicles (CAVs) at signal-free intersections instead of using conventional traffic signals. However, few studies have attempted to integrate both strategies to better facilitate the CAV control at signal-free intersections. To this end, this study proposes a hierarchical control model, named COOR-PLT, to coordinate adaptive CAV platoons at a signal-free intersection based on deep reinforcement learning (DRL). COOR-PLT has a two-layer framework. The first layer uses a centralized control strategy to form adaptive platoons. The optimal size of each platoon is determined by considering multiple objectives (i.e., efficiency, fairness and energy saving). The second layer employs a decentralized control strategy to coordinate multiple platoons passing through the intersection. Each platoon is labeled with coordinated status or independent status, upon which its passing priority is determined. As an efficient DRL algorithm, Deep Q-network (DQN) is adopted to determine platoon sizes and passing priorities respectively in the two layers. The model is validated and examined on the simulator Simulation of Urban Mobility (SUMO). The simulation results demonstrate that the model is able to: (1) achieve satisfactory convergence performances; (2) adaptively determine platoon size in response to varying traffic conditions; and (3) completely avoid deadlocks at the intersection. By comparison with other control methods, the model manifests its superiority of adopting adaptive platooning and DRL-based coordination strategies. Also, the model outperforms several state-of-the-art methods on reducing travel time and fuel consumption in different traffic conditions.
Modeling Adaptive Platoon and Reservation Based Autonomous Intersection Control: A Deep Reinforcement Learning Approach
Jun 24, 2022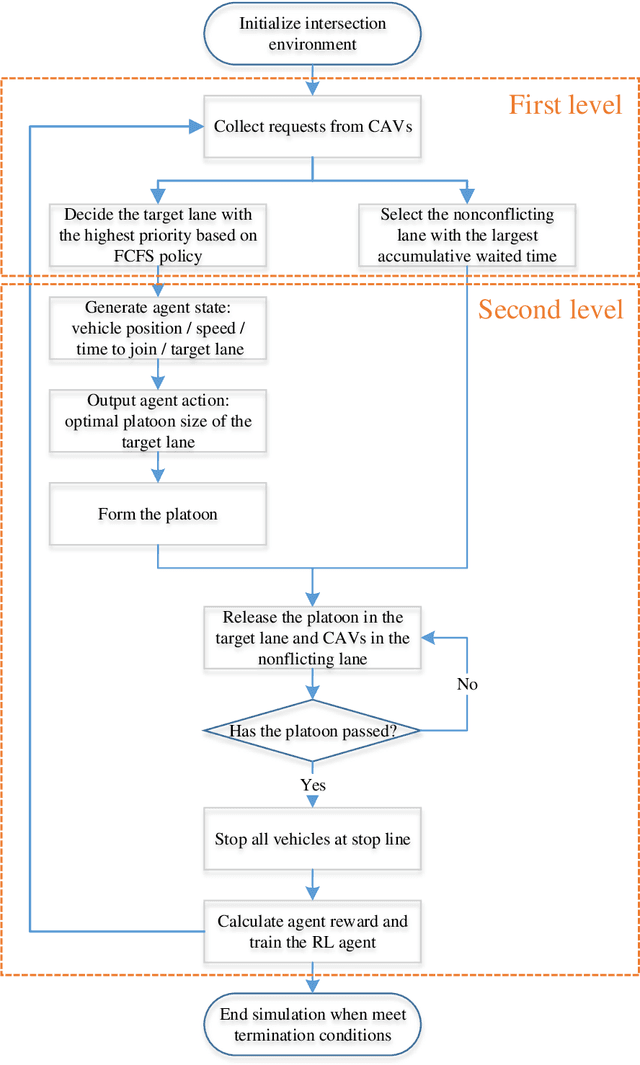
As a strategy to reduce travel delay and enhance energy efficiency, platooning of connected and autonomous vehicles (CAVs) at non-signalized intersections has become increasingly popular in academia. However, few studies have attempted to model the relation between the optimal platoon size and the traffic conditions around the intersection. To this end, this study proposes an adaptive platoon based autonomous intersection control model powered by deep reinforcement learning (DRL) technique. The model framework has following two levels: the first level adopts a First Come First Serve (FCFS) reservation based policy integrated with a nonconflicting lane selection mechanism to determine vehicles' passing priority; and the second level applies a deep Q-network algorithm to identify the optimal platoon size based on the real-time traffic condition of an intersection. When being tested on a traffic micro-simulator, our proposed model exhibits superior performances on travel efficiency and fuel conservation as compared to the state-of-the-art methods.
Automatic Clustering for Unsupervised Risk Diagnosis of Vehicle Driving for Smart Road
Nov 24, 2020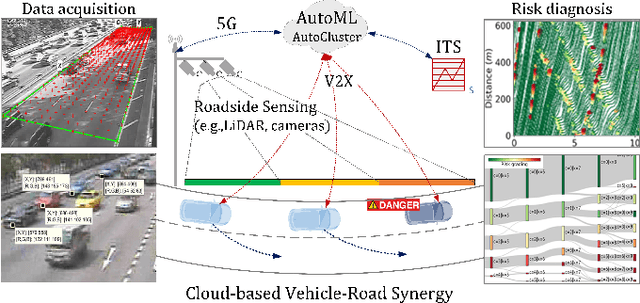
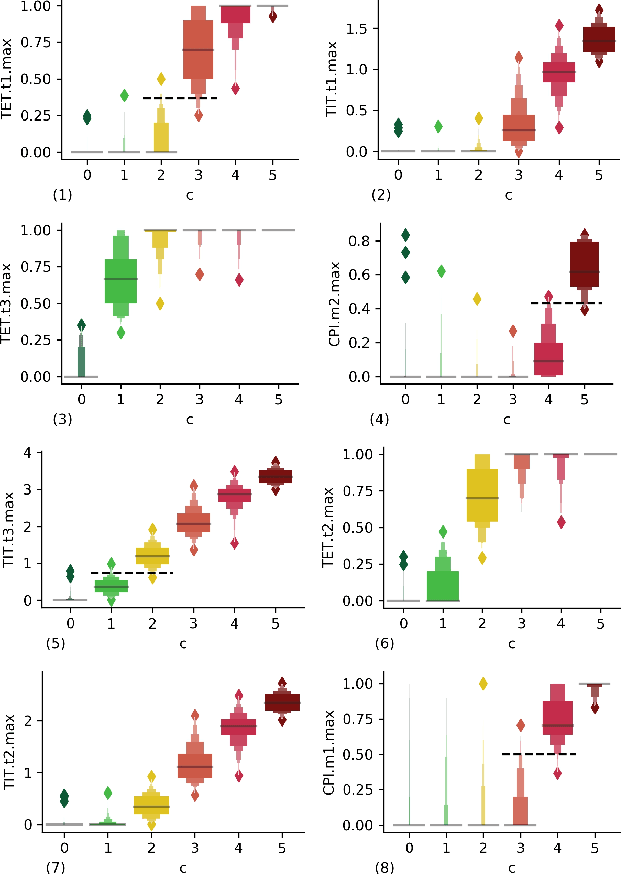
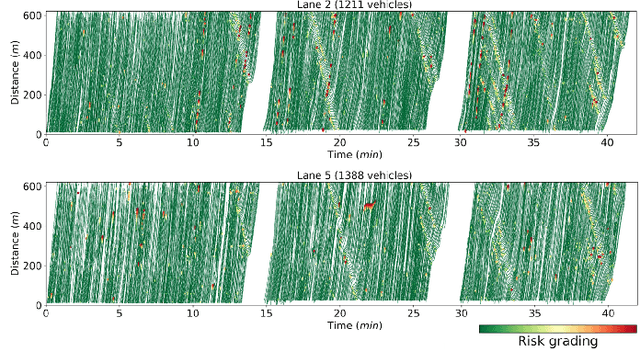
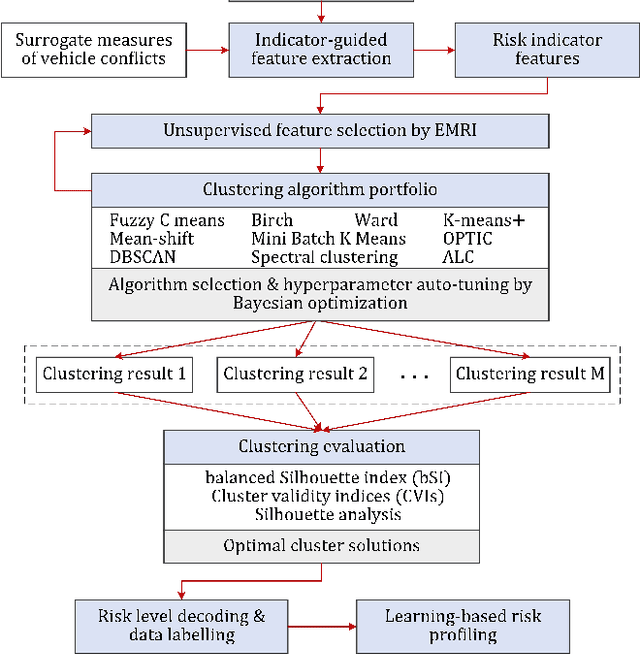
Early risk diagnosis and driving anomaly detection from vehicle stream are of great benefits in a range of advanced solutions towards Smart Road and crash prevention, although there are intrinsic challenges, especially lack of ground truth, definition of multiple risk exposures. This study proposes a domain-specific automatic clustering (termed Autocluster) to self-learn the optimal models for unsupervised risk assessment, which integrates key steps of risk clustering into an auto-optimisable pipeline, including feature and algorithm selection, hyperparameter auto-tuning. Firstly, based on surrogate conflict measures, indicator-guided feature extraction is conducted to construct temporal-spatial and kinematical risk features. Then we develop an elimination-based model reliance importance (EMRI) method to unsupervised-select the useful features. Secondly, we propose balanced Silhouette Index (bSI) to evaluate the internal quality of imbalanced clustering. A loss function is designed that considers the clustering performance in terms of internal quality, inter-cluster variation, and model stability. Thirdly, based on Bayesian optimisation, the algorithm selection and hyperparameter auto-tuning are self-learned to generate the best clustering partitions. Various algorithms are comprehensively investigated. Herein, NGSIM vehicle trajectory data is used for test-bedding. Findings show that Autocluster is reliable and promising to diagnose multiple distinct risk exposures inherent to generalised driving behaviour. Besides, we also delve into risk clustering, such as, algorithms heterogeneity, Silhouette analysis, hierarchical clustering flows, etc. Meanwhile, the Autocluster is also a method for unsupervised multi-risk data labelling and indicator threshold calibration. Furthermore, Autocluster is useful to tackle the challenges in imbalanced clustering without ground truth or priori knowledge