 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSim-to-Real Learning of All Common Bipedal Gaits via Periodic Reward Composition
Nov 02, 2020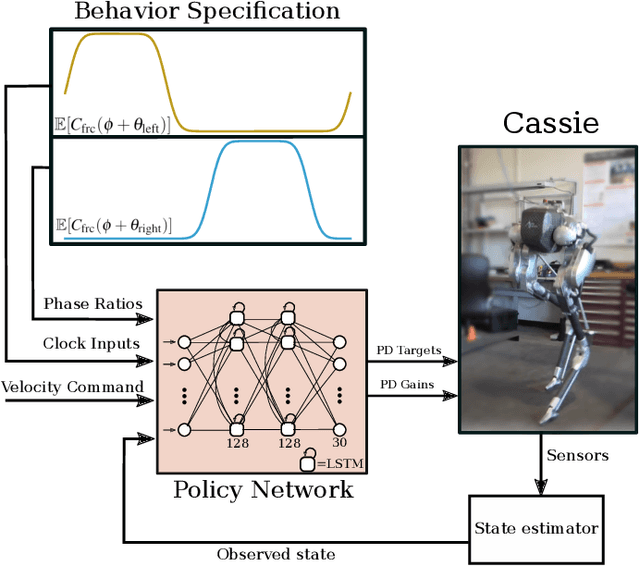
We study the problem of realizing the full spectrum of bipedal locomotion on a real robot with sim-to-real reinforcement learning (RL). A key challenge of learning legged locomotion is describing different gaits, via reward functions, in a way that is intuitive for the designer and specific enough to reliably learn the gait across different initial random seeds or hyperparameters. A common approach is to use reference motions (e.g. trajectories of joint positions) to guide learning. However, finding high-quality reference motions can be difficult and the trajectories themselves narrowly constrain the space of learned motion. At the other extreme, reference-free reward functions are often underspecified (e.g. move forward) leading to massive variance in policy behavior, or are the product of significant reward-shaping via trial-and-error, making them exclusive to specific gaits. In this work, we propose a reward-specification framework based on composing simple probabilistic periodic costs on basic forces and velocities. We instantiate this framework to define a parametric reward function with intuitive settings for all common bipedal gaits - standing, walking, hopping, running, and skipping. Using this function we demonstrate successful sim-to-real transfer of the learned gaits to the bipedal robot Cassie, as well as a generic policy that can transition between all of the two-beat gaits.
Learning Spring Mass Locomotion: Guiding Policies with a Reduced-Order Model
Oct 21, 2020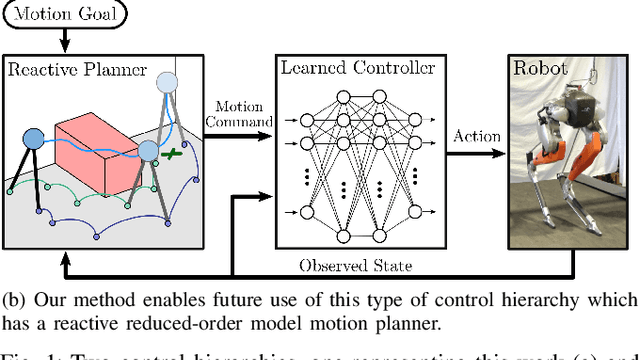
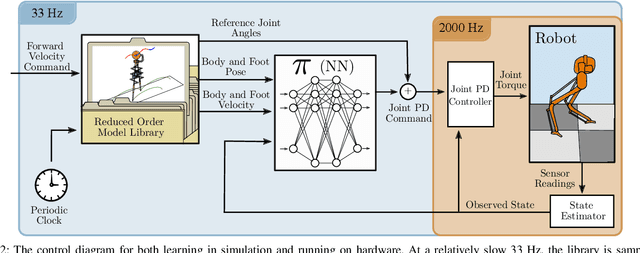
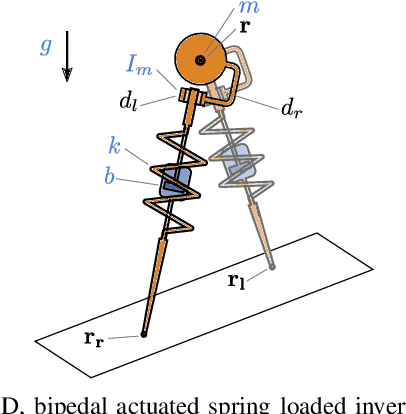
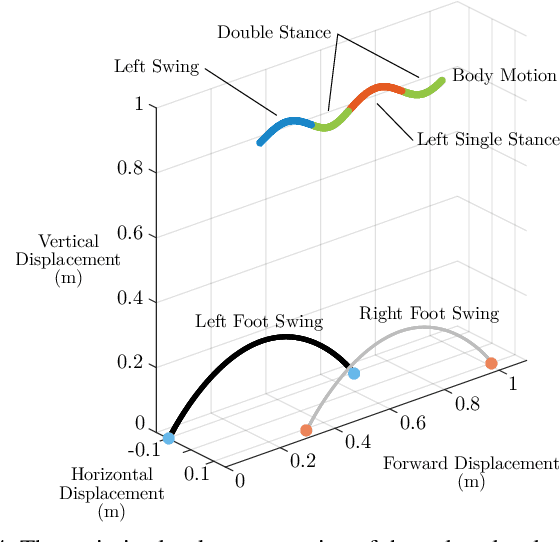
In this paper, we describe an approach to achieve dynamic legged locomotion on physical robots which combines existing methods for control with reinforcement learning. Specifically, our goal is a control hierarchy in which highest-level behaviors are planned through reduced-order models, which describe the fundamental physics of legged locomotion, and lower level controllers utilize a learned policy that can bridge the gap between the idealized, simple model and the complex, full order robot. The high-level planner can use a model of the environment and be task specific, while the low-level learned controller can execute a wide range of motions so that it applies to many different tasks. In this letter we describe this learned dynamic walking controller and show that a range of walking motions from reduced-order models can be used as the command and primary training signal for learned policies. The resulting policies do not attempt to naively track the motion (as a traditional trajectory tracking controller would) but instead balance immediate motion tracking with long term stability. The resulting controller is demonstrated on a human scale, unconstrained, untethered bipedal robot at speeds up to 1.2 m/s. This letter builds the foundation of a generic, dynamic learned walking controller that can be applied to many different tasks.